無人載具應用的新天地
無人水下載具深具應用潛力,能多次使用,不需搭載操作人員與乘客,而能搭載特定裝備或酬載,透過遠距或自主運作完成任務。現階段無人水下載具應用包括國防、海洋科學研究、油氣管路等海洋設施鋪設與維護、海底地理資訊調查等。而與無人陸上載具相比,無人水下載具的商業應用載具與服務方面仍有很大發展空間,且興建與運作大規模離岸風場的過程中,也會需要使用多種無人水下載具及無人空中載具,均為台灣發展各種陸海空無人載具技術與應用服務的契機。其中水下遠端操控載具除了是利基市場產業之外,還具有高專業度、高單價、高度客製化、產品需具備高穩定度、重後勤維護與教育訓練、市場需求穩定成長等特性。由於無人載具的遠端操控並不容易,操控者需經訓練,才能良好的遠端操控駕馭無人載具,又無人載具的遠端操控亦需具備有即時性,方能有良好的操控體驗,因此工研院發展的無人水下載具操控軟體平台系統具有即時性及易操作特性,透過低延遲遠距虛擬實境 (Virtual Reality; VR) 操控技術,讓操控人員在猶如置身水下載具的情境下,無需特別的訓練,即能操控無人水下載具。透過此操控軟體平台系統,無人水下載具能應用於即時水下監控、教育研究、娛樂等領域,使無人水下載具的應用範圍及效益獲得提升。
無人水下載具操控軟體平台系統
無人水下載具操控軟體平台系統具有即時性、易操作及虛擬實境等特性,透過VR設備,使用者將進入猶如身歷其境的虛擬駕駛艙中,可觀看水下即時影像,並由虛擬儀表板中檢視從無人載具回傳的各類感測器資料,如深度、溫度、載具姿態(左右偏擺、翻滾)、電池狀態(電池用量、電壓、電流)、雷射及LED照明,並在虛擬駕駛艙中,以本平台系統開發的隨點即Go技術直覺的操控水下載具,使用者只需用控制器點擊畫面中任何看到的一點,無人水下載具即會自動前往指定地點,大大降低無人載具操作門檻,其操控情境如圖1與影1,影片中操控者透過VR頭戴顯示器與手把控制器,在沉浸式的虛擬駕駛艙中以隨點即GO的直覺操控方式,輕鬆完成以遠端操控的方式操控無人水下載具到達水池中標記的數個目標點。
 圖1 隨點即Go 直覺式操控無人水下載具使用者介面
圖1 隨點即Go 直覺式操控無人水下載具使用者介面
影1 展示以隨點即Go 直覺式操控無人水下載具到達水池中標記的數個目標點
無人水下載具操控軟體平台系統是以網頁技術開發操控介面,可支援所有符合WebVR規格的VR設備,並提供載具操控抽象層介面,可輕易掛載各式載具操控程式,駕馭各類載具,其中低延遲遠距操控技術,可控制影像及控制訊號的傳輸延遲維持小於250ms與130ms。以下簡介此平台系統的主要功能模組。
無人水下載具操控平台系統架構圖如圖2,此系統由三個模組組成,包括ITRI Cockpit、User Interface、Communication Driver,分述如下:
1.ITRI Cockpit模組 ITRI Cockpit是整個平台系統的核心模組,此模組負責接收使用者透過User Interface傳送過來的操控指令,經過轉譯處理後傳送給Communication Driver模組,再由Communication Driver模組將操控指令傳送給無人水下載具,同時ITRI Cockpit模組亦負責接收Communication Driver模組傳送回來的遙控載具(Remotely Operated Vehicle; ROV)上攝影機所拍影像及相關資訊,例如載具姿態、載具所在的深度及環境溫度、載具照明及電池狀態等,ITRI Cockpit模組接收資訊後,同樣經過轉譯處理再傳送到User Interface,讓使用者透過VR設備觀看影像及查看資訊。
2.Communication Driver模組 Communication Driver模組的功能是負責將ITRI Cockpit模組傳來的抽象指令轉譯成ROV能接收的指令,另一方面則是將ROV傳送回來的資訊轉譯處理成統一格式再傳送給ITRI Cockpit模組,在Communication Driver模組中,可自由擴充與添加各種不同的ROV傳輸介面協定,例如無人船或是其他無人載具的傳輸協定,使無人載具操控軟體平台系統能使用於各種不同傳輸協定的ROV。
3.User Interface User Interface則是負責接收使用者的操控指令及呈現ROV的相關資訊及回傳影像,未來將再加入動感座椅,讓使用者除了視覺上的影像外,還可透過動感座椅體感經驗載具即時的姿態變化,使虛擬實境的體驗更具有臨場感與真實感。
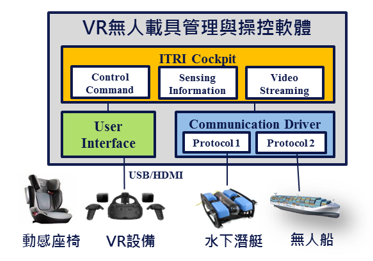 圖2 無人水下載具操控軟體平台系統架構
圖2 無人水下載具操控軟體平台系統架構VR遠端操控應用
工研院目前正使用自行開發的無人水下載具操控平台系統於養殖魚塭,並規劃推廣於教育與娛樂等應用服務,詳細說明如下。
1.魚塭養殖應用 目前漁民大部份依傳統經驗養殖,若使用無人水下載具,可以解決人力不足,降低工時、魚飼成本,還可隨時掌握魚、蝦生長過程,能大大提昇養殖收益。其他優點還包括即時觀察水下活動情形、觀察攝餌情況、監測水質等等,詳細說明如表1。
 表1 應用無人水下載具於養殖魚塭的效益
表1 應用無人水下載具於養殖魚塭的效益2.海洋教育觀光應用 為提高保護海洋環境的意識,國外有許多水下雕像博物館,例如在墨西哥北部加勒比海岸的 M.U.S.A. (Museo Subacuático de Arte) 海底雕塑博物館(圖3),與位於西班牙蘭索羅特島(Lanzarote)海岸的大西洋博物館(Museo Atlantico)(圖4),我國四面環海,於2015年通過水下文化資產保存法[1][2],為落實水下文資法,也以水下博物館的概念作為水下文化資產展覽、教育與推廣的場所;而為參觀被安置於海床上的雕像,參觀水下博物館的遊客必須會浮潛或潛水才有辦法抵達,如此大大增加了遊客參觀水下博物館的門檻,若能將無人水下載具操控軟體平台系統應用於此領域,將能讓大眾不須要擁有在水下呼吸的裝備,就能透過虛擬駕駛艙欣賞水下藝術作品,如此將能降低參觀水下博物館的門檻,使參觀水下博物館親民化、普及化,達到水下博物館教育推廣的目標。目前初期規劃將與水下光通訊技術搭配,和基隆海科館與屏東海生館合作,驗證此海洋教育概念。
 圖3 M.U.S.A. (Museo Subacuático de Arte) (來源: Underwater Sculpture by Jason deCaires Taylor)
圖3 M.U.S.A. (Museo Subacuático de Arte) (來源: Underwater Sculpture by Jason deCaires Taylor) 圖4 Museo Atlantico (來源: Underwater Sculpture by Jason deCaires Taylor)
圖4 Museo Atlantico (來源: Underwater Sculpture by Jason deCaires Taylor)VR遠端操控應用於無人載具之未來發展
工研院開發之遠端操控平台系統透過抽象層介面可操控符合OpenROV[3] 或ArduSub[4] 傳輸規格的無人載具,並讓使用者透過符合WebVR規格的VR設備,經由虛擬駕駛艙帶給使用者沉浸式體驗;未來將整合體感座椅,使用者可於體感座椅上操控水下載具,即時體驗3軸6自由度,共計上下、左右、前後、俯仰、偏擺、翻滾等12種位移方向等更有臨場感的體感回饋,並將建立管理系統,管理多種無人載具(水下/水面/空中),提供操控端與被控載具的配對管理。
相關連結: 回179期_打造無人駕駛的未來世界專輯