工研院資通所 徐志偉
隨著科技進步,台灣自動駕駛車輛已逐步實現,台中花博水湳智慧城自駕巴士試運行計畫於2018年12月21日舉辦開幕式,自2018年12月22日至2019年1月21日於中科路(大鵬路至經貿五路段),提供一般民眾免費試乘服務。此次試運行計畫由台中市府協助提供場域,整合國內自駕車相關的營運、設備、技術服務等產業組成台中旗艦團隊,包含由豐榮客運主導的G-BUS及工研院研發的M-BUS兩套車輛系統於該場域試運行,其中M-Bus則由工研院、車王電、華德動能與台灣大學合作,搭載工研院自主研發的自動駕駛感知次系統Surrounding Sensing Subsystem (S3),也是國內首套針對自動駕駛需求研發的環境周邊感知次系統。此次試運行也在台中水湳智慧城測試場域進行混合車流自動定速巡航、自動車道維持、自動定點接駁停靠、自動迴車控制、自動緊急煞車結合機車路徑預測、路口號誌連動車速控制與自駕車優先號誌 (綠燈延長)等功能與應用情境體驗。
台中花博自駕接駁中巴行駛路線與應用情境規劃
為提供民眾體驗的台中花博自動駕駛電動中型巴士,該車輛搭載多顆光達、雷達、衛星定位、慣性導航與V2X 等感測與通訊元件。由於是在實際的道路上運行,因此相關的防護措施以及安全系統是必要考量。自動駕駛中巴上搭載了五顆光學雷達,以及九個相機鏡頭,目的是要偵測出所有車輛周圍的物件,以便在危險發生前做出相對的應變措施。自駕車於台中水湳經貿場域的路線,該路線為狹長環狀路線,共有3個停靠點,分別為中央公園北站(A3)、地下停車場站(A5)與中央公園南站(A6),其中直線路段為雙向雙線道,自動駕駛巴士行駛在靠外側的專用車道,並在A3與A6頭尾兩端進行迴轉。行駛車速設定在時速15到20公里,迴轉路段則會放慢行駛,以確保安全。
以下為台中水湳場域應用情境展示項目:
▲ 自動定速巡航 (全程)
▲ 自動車道維持 (全程)
▲ 自動定點接駁停靠 (A3, A5, A6)
▲ 自動迴車控制
▲ 自動緊急煞車結合機車路徑預測
▲ 路口號誌連動車速控制
▲ 自駕車優先號誌 (綠燈延長)
台中花博自駕車應用體驗與服務
以下將分別敘述民眾於自駕車上所體驗的應用內容,分別為自動定速巡航、自動車道維持、自動定點接駁停靠、自動迴車控制、自動緊急煞車結合機車路徑預測、路口號誌連動車速控制與自駕車優先號誌 (綠燈延長)。為了讓民眾於自駕車試運行過程中體驗多種感受,因此,設計於自駕車內透過螢幕呈現三種視角畫面,如圖1所示,分別為乘客視角、車外視角以及駕駛視角。乘客視角提供乘車民眾即時觀看光達與攝影機感測器所偵測到外在環境的畫面;車外視角則是透過車外攝影機監控自駕車於車外行駛的畫面;駕駛視角則是透過車內攝影機即時監控駕駛的行為,例如可看到駕駛是否有將手放置於方向盤上或腳踩在油門或煞車,透過多種視角可以讓民眾觀看自駕車運行的真實性。
 圖1 台中花博自駕車內所提供的視角
圖1 台中花博自駕車內所提供的視角▲ 自動定速巡航與自動車道維持應用
此應用提供民眾於自駕車中體驗自動定速巡航與自動車道維持,自駕車將依固定20km/hr的速度行駛於車道的中心線,不會偏移至另一個車道。此外,從駕駛的視角可看出駕駛於車輛行駛過程中雙手皆未放置於方向盤上;透過乘客的視角可看出自駕車一直行駛於光達所偵測的車道中心線,並搭配外部攝影機監控的畫面佐證車輛定速直線行駛並未偏移。
▲ 自動定點接駁停靠應用
此應用提供民眾於自駕車中體驗自動定點接駁停靠,自駕車將於固定站點停靠,車門開啟等乘客上下車後,駕駛啟動自駕模式,自駕車即可以定速行駛於下個停靠點。
▲ 自動迴車控制應用
此應用提供民眾於自駕車中體驗自動迴車控制,自駕車行駛到接駁路線的端點並於路口做車輛180度迴車的動作。從駕駛的視角可看出駕駛於車輛行駛過程中雙手皆未放置於方向盤上,並且方向盤因車輛迴車所以有大幅度的轉動;透過乘客的視角可看出自駕車於迴車的情況下車輛的運行軌跡因車輛動態的變化而有所調整,並搭配外部攝影機監控自駕車行駛的畫面佐證車輛迴車的行為。圖2為應用示意圖。
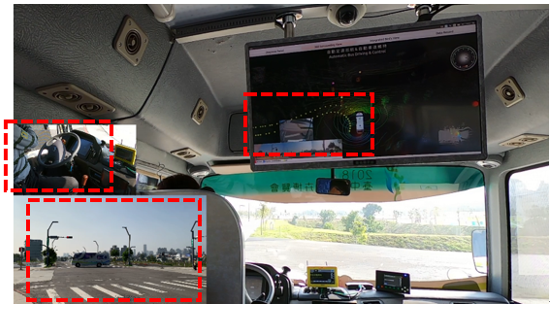 圖2 自動迴車控制應用
圖2 自動迴車控制應用▲ 自動緊急煞車結合機車路徑預測應用
此應用提供民眾於自駕車中體驗自動緊急煞車結合機車路徑預測,自駕車行駛於運行的路線上,機車從左側車道超車並快速切入右側並右轉至路口,初估機車時速約有40公里左右向右側切入,而自駕中巴在時速約20公里的定速行駛下,當機車切入通過自駕車前方,自駕車的前方感測器偵測到後完全煞停。透過乘客的視角可看出自駕車於機車切入至自駕車前的情況下,光達感測器偵測到機車物件(畫面中黃色小點)而做煞停的動作,並搭配外部攝影機監控自駕車行駛的畫面佐證機車確實有切入至自駕車的車前。圖3為應用示意圖。
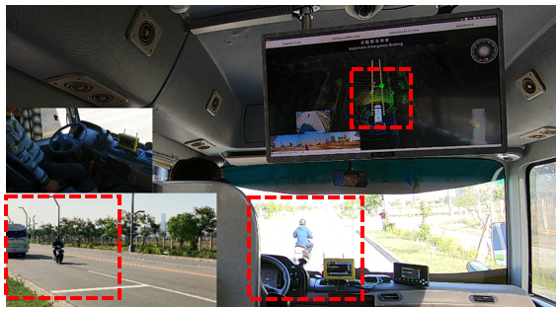 圖3 自動緊急煞車結合機車路徑預測應用
圖3 自動緊急煞車結合機車路徑預測應用▲ 路口號誌連動車速控制應用
此應用提供民眾於自駕車中體驗路口號誌連動車速控制,自駕中巴對於辨識號誌,能夠與號誌連動得知尚餘多少秒數會變綠燈或紅燈,進而判斷是否進行煞車或者維持車速通過。自駕車行駛於運行的路線上,透過車聯網V2X通訊接收路口號誌的狀態資訊,如遇到紅燈則以慢速行駛到路口停等線;如果是綠燈則以安全考量定速或加速通過路口。透過乘客的視角可看出目前路口號誌的狀態與目前自駕車的車速,並搭配車外的畫面佐證自駕車於紅燈狀態下緩速於路口停等。圖4為應用示意圖。
 圖4 路口號誌連動車速控制應用
圖4 路口號誌連動車速控制應用▲ 自駕車優先號誌應用
此應用提供民眾於自駕車中體驗自駕車優先號誌,自駕中巴透過車聯網V2X通訊方式辨識號誌,如果剛好遇上號誌秒數即將由綠燈轉為紅燈,則自駕中巴將會通過,透過車聯網V2X通訊下延長號誌的指令,號誌則會延長幾秒的綠燈時間,並確保自駕車通過路口的安全。透過乘客的視角可看出目前路口號誌的狀態與號誌的剩餘秒數,並搭配車外的畫面佐證自駕車於綠燈狀態下透過延長綠燈秒數,順利通過路口。圖5為應用示意圖。
 圖5 自駕車優先號誌應用
圖5 自駕車優先號誌應用優化軟硬體設備 打造安全便利的搭乘體驗
工研院在台中水湳智慧城提供民眾搭乘體驗自駕車的應用與情境,未來自駕車系統將朝著全自動、連網、高效率與安全等指標邁進。透過軟硬體設備持續優化,打造安全便利的自動駕駛系統,其系統包含自駕車端與自駕路側端。自駕車端智慧系統融合光學雷達與機械視覺高速相機解析地形地物、交通號誌、障礙物,再輔以由衛星接收站基於高精準度的衛星定位系統,掌控全方位的空間資訊,運算行車軌跡,整合轉向、剎車、油門伺服單元的控制模型,完成安全的自動駕駛。而自駕路側資訊系統連結路口攝影機、號誌控制器、無線基地台,將車與路的資訊即時匯集到雲端大數據平台,協助台中提高交通效率。工研院於台中花博的自駕車功能情境展示,成功地提供公共運輸的第一與最後一哩接駁示範應用,有助於帶動城鄉發展,也展現自駕車在提升交通應用與服務的創新。
相關影片報導
台中水湳智慧城內無人自駕車試車,未來「自動駕駛公車」可望提供區域內,主要據點間的接駁服務。
相關連結: 179期_打造無人駕駛的未來世界專輯
相關連結: 台中花博無人駕駛自駕車影片 (電腦與通訊 179期)