有鑒於自駕車配掛通訊、感測與定位設備,其於車聯網通訊、光達感測與定位技術研發浪潮已勢不可擋,其相關應用也應運而生,如自駕車透過車聯網技術提供行車安全防護、自駕載客接駁服務、自駕車隊的應用。根據國際市場研究機構 Navigant Research所做的報告,在城市或都會區內的自駕車接駁服務正在延伸其觸角及增加其使用上的方便性,研究顯示這促使個人使用自用車的頻率有減少的趨勢。有此可見,自駕車載客接駁服務似乎是一個減少路上行車之可行方向。反映到大眾運輸,一般所謂的「最後一哩路」,會因為人們的移動需求較分散,較難支撐固定時間及固定路線之大眾運輸系統之營運,因此「最後一哩路(Last Mile)」一般缺乏大眾運輸系統,如果有一種具安全性且營運成本較低(如自動駕駛,減少人力成本等)之大眾運輸系統可滿足人們最後一哩路之需求,那將有效使人們共乘此大眾運輸系統,並有效減少人們開車(如老年人)或騎車(如年輕人)之頻率,進而減少路上車輛,降低民眾因事故所造成的傷亡。本文將介紹工研院於自駕車結合車聯網V2X (Vehicle-to-Everything)通訊技術之安全性、效率性與便捷性創新應用,讓民眾可感受自駕車多元的應用發展。
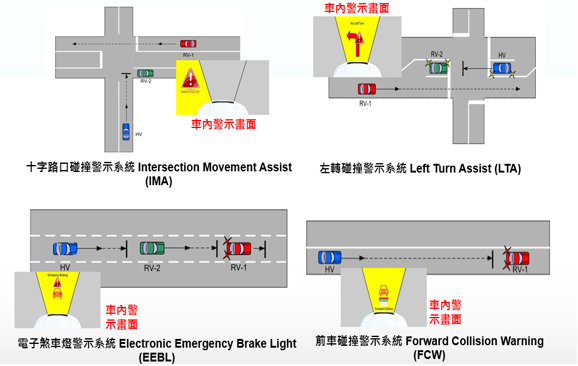 圖1 自駕車結合V2X行車安全性應用情境
圖1 自駕車結合V2X行車安全性應用情境自駕車結合IMA、LTA、EEBL、FCW四種V2X安全警示應用,其應用情境說明與設計原則如下:
▲ 自駕車IMA十字路口防碰撞警示:此應用主要目的為協助自駕車避免於路口與其他車輛發生碰撞,並警告即將違反交通號誌或停車標誌的駕駛(如搶黃、紅燈)。IMA應用亦可結合路側基礎建設(如路側單元RSU (Road-side Unit)、雷達、交通號誌)與車內車機設備兩種元件共同運作。當裝有OBU通訊設備的自駕車接近裝設有RSU通訊設備的十字路口,其車上設備可接收到含有路口地理位置、全球衛星定位系統 (GPS)差分校正資訊、號誌狀態(如綠燈剩餘秒數)與雷達偵測到車輛的訊息。自駕車內OBU設備透過所接收的訊息判斷車輛是否處於危險狀態並提醒隨車駕駛。以下為自駕車IMA應用為了提升直行車輛與橫向車道左右來車行車安全所設計的警示條件。
■ Phase 1 – HV (Host vehicle)在路口停止時,RV (Remote Vehicle)於橫向車道逼近路口,HV UI (User Interface)顯示IMA畫面來車。
■ Phase 2 –RV與HV於前方交會,且兩車碰撞時間TTC (Time-to-Collision)<5sec及差距低於3sec,HV UI以IMA畫面和聲音警告。
▲ 自駕車LTA左轉防碰撞警示:此應用希望避免自駕車於左轉時,因受到對向左轉車輛之阻隔,致使發生與直行車發生碰撞之機會。車內針對左轉路徑橫越衝突點時會發出警示。以下為自駕車LTA應用為了提升左轉車輛與對向來車行車安全所設計的警示條件。
■Phase 1 – HV於路口處準備左轉且打左轉燈,此時對向車道有來車,HV UI顯示LTA畫面。
■Phase 2 –HV於路口左轉且與對向來車兩車TTC<5sec及差距低於3sec,HV UI以LTA畫面和聲音警告。
▲ 自駕車EEBL電子煞車燈警示:此應用適用於當前方車輛發生緊急煞車,前方車輛將其自身的電子煞車資訊透過廣播的方式傳遞給後方的自駕車輛,以提醒自駕車輛留意,避免發生連環車禍。針對前方車輛發出電子煞車資訊的時機點則是依據車速變化或煞車訊號,其煞車資訊也可與適應性巡航控制系統(Adaptive Cruise Control System, ACCS)相結合。當後方的自駕車輛接收到緊急煞車訊息,則透過車內螢幕顯示警示畫面或發出警示音提醒隨車駕駛。以下為自駕車EEBL應用為了降低與前方及前方相鄰車道車輛緊急煞車造成碰撞的風險所設計的警示條件。
■Phase 1 – RV在HV前方或相鄰左右車道且HV擷取到RV煞車燈號,HV UI顯示前方煞車警示。
■Phase 2 – 滿足上述且減速度>0.5g,HV UI以EEBL緊急煞車畫面和聲音警告隨車駕駛。
▲ 自駕車FCW前車碰撞警示:此應用的主要目的為協助並警告後方自駕車,於直行道路上避免與前方車輛發生碰撞。後方自駕車輛的OBU接收來自前方其他車輛的基本安全訊息(如座標位置、車速、方向、偏航速率與加速度),透過所接收到的資訊可與自身車輛的位置、車速與道路資訊(如地圖資料)比對並判斷是否會與前方車輛發生碰撞,其判斷結果將透過螢幕顯示或警示音提醒隨車駕駛。以下為自駕車FCW應用為了降低與前方車輛距離過近造成碰撞的風險所設計的警示條件。
■RV在HV前方同向並且停止、緩慢前進或煞車,TTC<5sec,HV UI以FCW畫面和聲音警告隨車駕駛。
自駕車除了整合車聯網iRoadSafe系統,以及提供上述四種標準V2X安全性應用之外,亦可針對年長與行動不便者於路上行走時,提供自駕車車內警示。
▲ 自駕車警示年長與行動不便者通行應用:此應用的主要目的為防護行人與弱勢用路人,例如老人、行動不便與小孩,有使用輪椅行動不便的行人欲穿越馬路時,在輪椅配置V2X通訊裝置,即使行動不便者被停在路邊的車輛遮蔽,也可透過V2X通訊警示後方即將通過路口的自駕車,有右側行人通行。
自駕車效率與便捷性創新應用
於自駕車對外聯網之效率與便捷性創新應用,工研院設計自駕車隊車流均勻速度建議應用、自駕貨車自動過磅應用、自駕接駁公車優先號誌控制應用與前方交通壅塞與異常天候資訊推播應用。以下為應用情境說明:
▲ 自駕車隊車流均勻速度建議應用:此應用的主要目的為透過高速公路或平面道路上建置的路側設施(RSU)以車聯網V2X通訊方式蒐集自駕車上的車載設備(OBU)路段車流資訊後,經過路側設施或雛形平台運算以產生路段車流均勻建議速度。此車流均勻速度再經由適當時間、地點由路側設施或雛形平台,提供給自駕車調整其行駛速度,圖2為應用示意圖。
圖2 自駕車隊車流均勻速度建議應用 ▲ 自駕貨車自動過磅應用:此應用主要目的為未來減少自駕貨車因頻繁進出過磅站所造成的耗時問題。如圖3所示,此應用包含埋設在車道正下方的石英測重磅片模組、磅片模組控制主機、車輛感應線圈,與裝載於車道上方門架之車牌辨識模組與RSU路側設備,透過車聯網V2X通訊傳送並導引自駕貨車是否要進站過磅。
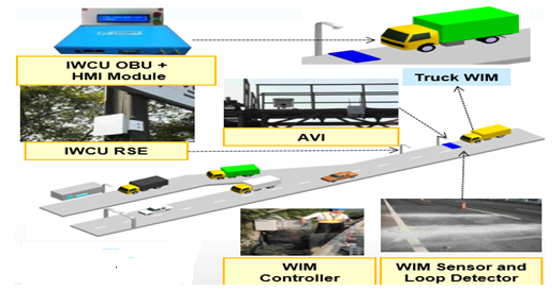 圖3 自駕貨車自動過磅應用
圖3 自駕貨車自動過磅應用▲ 自駕接駁公車優先號誌控制應用:自駕接駁公車優先號誌控制的策略包括被動式優先控制策略、主動式優先控制策略兩大類,其中被動式優先控制策略主要是依據公車路線和乘客量型態的相關資訊來持續性地執行優先控制策略,而不需要車聯網系統或優先需求啟動系統,因此常常因路線流量變化、乘客數量、班次、靠站停等時間等因素不能有效掌控,而造成績效不佳;故目前公車優先號誌大多以主動式優先控制策略為主。主動式優先控制策略係因偵測到自駕接駁公車,隨後有了優先控制的需求所提供的綠燈延長、綠燈早開、插入時相策略。由於自駕接駁公車必須先被偵測到,因此偵測所用的車聯網V2X通訊技術就相當關鍵,如何提供有效的車聯網技術,使能更快速可靠地偵測到自駕接駁公車到達,並提高公車到達時間預測之準確性。此應用主要目的為透過動態調整自駕接駁公車接近路口時的號誌,號誌控制策略有綠燈延長或紅燈早開,可有效讓公車順暢通行於路口,進而鼓勵民眾搭乘自駕接駁公車,以提升車聯網發展之社會效益。
▲ 前方交通壅塞、交通號誌、速限與異常天候資訊推播應用:此應用透過車聯網V2X通訊方式傳遞給自駕車多重資訊,如前方交通壅塞資訊、交通號誌資訊、速限與異常天候資訊。當自駕車通過RSU所推播資訊的路口,可配合不同的資訊做調整,例如自駕車收到路段壅塞與交通號誌資訊,即可動態調整車速,以達順暢運行之綜效。如接收到道路速限資訊,則可依目前的車速調整成該路口的限速。
自駕車於車聯網應用之趨勢與挑戰
本文介紹自駕車運用車聯網V2X通訊技術發展出安全性、效率性與便捷性等創新應用。目前全球各大廠的自駕車技術發展,以自小客車與中型巴士為主,以安全性應用而言,除了車體中的通訊單元、感測單元與運算單元必須具備精準而快速的訊號擷取與反應能力,還須經過長時間的實地測試,以掌握所面對的複雜環境,不過在實際環境中測試風險相當高。此外,因應V2X車聯網與自駕車應用與服務的發展,既有車聯網與自駕車感測元件與路側設施將產生相關通訊模組或設備之需求,因此相關通訊晶片、模組與產品的設計、製造即成為我國業者發展的機會點所在。
相關連結: 回179期_打造無人駕駛的未來世界專輯