隨著都市人口的愈加密集化,交通闢建速度遠不及車輛成長速度之下,交通事故已成為交通運輸過程中難以預測之意外事件,為有效防制道路交通事故發生,降低交通事故傷亡人數及事故嚴重程度,各國政府無不致力於交通安全防制的課題。特別是不同方向車流匯集的重要交岔路口,不僅容易發生意外交通事故,也容易因不同方向車流間的長時間切換而造成交通堵塞。
在複雜的都會區交通環境下,一般路口監視器影像中所拍攝車輛方向、大小、形狀都不相同,加上攝影機視角的差異與監控影像品質之問題,造成傳統影像監控技術難以直接應用到不同攝影機所拍攝的影像內容,往往需要事前對系統參數進行人工調整,才能應用不同攝影機所拍攝之影像。例如傳統車輛計數方法,需要在單一車道上以人工繪製計數區來計算通過車輛,但在都會區中常見之大型交岔路口卻無法以類似的手法來計算不同流向車輛。
近年來受無人機商業化及深度神經網路(Deep neural network, DNN)技術蓬勃發展,因此發想以無人機搭載高解析度數位相機設備,能更有效率的蒐集相關交通分析資料,作為交通改善決策分析。因此透過無人機拍攝高事故風險地點人車流動影像,並經由影像分析技術分析人車流衝突事件,找出車流易發生碰撞區塊,能在肇事發生前即診斷出交通衝突問題,供交通管理單位與道路設計者作為交通安全改善之參考。
傳統影像車流分析技術
傳統影像車流分析基於路口監視器拍攝畫面,透過影像處理技術取得車流資訊。基本原理為利用混合高斯模型 (Gaussian Mixture Model)預先建立影像靜止背景模型,如:道路、交通號誌及道路標線,並將連續輸入的路口車流影像和背景影像相減取得前景物,再利用方向梯度直方圖(Histogram of Oriented Gradient, HOG)特徵與支援向量機(Support Vector Machine, SVM)分類器偵測車輛位置取得車流資訊。
基於傳統影像車流分析方法主要有幾項劣勢,包含:路口監視器畫質普遍只有百萬畫素、路口攝影機鏡頭易受氣候影響導致成像品質不佳、不同視角下的車輛辨識問題、快速的光影變化會引發誤判等缺點,例如:雲層遮蔽太陽時會在影像上發生全面性的亮度差異,因此在準確度不足情況下,難以全面應用至交通路口分析。
 圖1 路口監視器拍攝畫面 (高重疊性)
圖1 路口監視器拍攝畫面 (高重疊性)無人機空拍影像優勢
由於近年來各國逐漸發展無人機相關產業,從早期用於軍事、國防用途,到目前應用在農/漁業應用、國土測繪、環境監測及危險搜救任務等民生範疇;因此無人機車流分析技術選用多軸無人機作為載具,其優勢在於能定點旋停拍攝、無需跑道起降及體積小不易受地理環境的限制,搭配載攝影機能垂直俯視路口拍攝,其取像幾何失真遠較一般監視器影像更小,適合用於分析交通狀況。
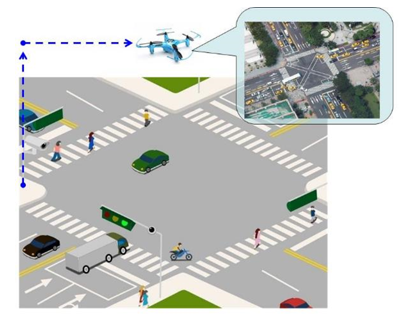 圖2 路口空拍示意圖
圖2 路口空拍示意圖基於深度學習影像車流分析技術
隨著深度學習的崛起,許多科學領域都有相當突破性的發展,特別是在影像辨識方面,自從2012年Alex(2012)提出了著名的AlexNet之後,卷積神經網路(Convolutional Neural Networks,CNN)開始迅速的蓬勃發展,近年來不斷有許多基於卷積神經網路的優良架構被陸續提出,包含讓網路深度加深至十餘層的VGG架構及減緩梯度消失問題以突破上百層深度的ResNet架構。每年ImageNet百萬級圖像分類競賽冠軍的top-5錯誤率更是一直不斷地降低,甚至低於3.5%的人類辨識錯誤率。
卷積神經網路與過去機器學習方法的最大不同之處,在於過去方法皆有賴人類智慧去設計影像特徵,再透過機器學習根據影像特徵進行分類,因此影像特徵設計上的好壞會影響分類結果。然而由人類設計的影像特徵往往較為理想而單純,難以適用所有複雜而多變之實際影像內容。相對地,卷積神經網路將影像特徵的生成涵蓋在其網路架構裡,透過非常大量的影像訓練,在不同尺度(scale)上產生大量適用於各類影像的局部特徵,這些由百萬張真實照片所訓練歸納得出的局部影像特徵,遠較人類設計的影像特徵更為泛用,也更能呈現多數影像的局部特質。
因此透過深度學習在物件辨識上的高準確性,經由學習機制訓練車輛辨識模型,能有效於路口空拍影像中取得精確車輛位置資訊,並透過局部特徵與連續畫面物體移動向量,針對前一張影像的局部特徵找尋下一張影像中鄰近位置的相似局部特徵並加以匹配,估算出相似特徵在前後影像的位移作為追蹤結果產生車流軌跡。
 圖3 實際路口空拍圖
圖3 實際路口空拍圖 圖4 車流軌跡示意圖
圖4 車流軌跡示意圖空拍車流軌跡分析應用
透過無人機車流分析技術取得車流軌跡後,能進一步計算分析出如:交通衝突熱區、交通調查資料、交通號誌同步等資訊並取代過去以人力為主的交通數據蒐集方式。未來可用於預防性交通改善,降低事故發生及嚴重性,避免或減少事故損害的擴大,並可提供交通管理單位與道路設計者使用,作為號誌、燈控、動線等智慧交通設計參考,藉由預防性之風險管理,降低交通事故之傷亡結果與發生次數,以期增進整體道路行車安全品質及提升交通安全。
 圖5 路口交通衝突熱點分析
圖5 路口交通衝突熱點分析繫留無人機 無人機車流分析好幫手
採用無人機進行交通路口影像蒐集與拍攝,帶來前所未有的高空視角,有別以外透過路口固定式攝影機,高空拍攝有利於更直接有效的取得正射影像資料,也利於進行各項分析工作。然而無人機因機械結構、電池電量不足等限制,仍帶來一些影像蒐集或拍攝的困難,例如續航力不足,僅能連續蒐集20分鐘之資料、拍攝穩定度以及拍攝範圍等。未來將導入繫留無人機:採用繫留無人機,可機動部署於建築物頂樓,由市電供應無人機所需電力,無須擔心飛行時間不足之問題,以達長時間路口車流分析技術之目標,提升交通預防管理及改善效率。
 圖6 繫留無人機空拍示意圖
圖6 繫留無人機空拍示意圖相關連結: 回179期_打造無人駕駛的未來世界專輯