The Challenge and Trend of Indoor/Outdoor AMR
技術簡介
在全球高齡少子化的趨勢下,疫情的發生加速帶動了以無人載具來取代以人力為主的沉重或危險任務,也順勢銜接了last mile的物流交通,開始廣泛應用如無人貨品配送、校園/商場/園區安全巡檢、廠內/廠間大量搬運等場景。根據市調機構Market Research預估,2027年AMR全球產值將達722.2百萬美元,年複合成長率達17.3%。工研院資通所因應此趨勢需求領先發展出室內/外型無縫接軌之AMR技術,以期協助廠商建立技術能量,並打造更優質之生活環境。以下進行室內外無縫運行之AMR相關技術介紹:
一、 定位導航系統
傳統移動機器人主要仰賴物理性或機電性的導引(如色帶、磁軌等)於場域內進行固定
路徑之移動;而 AMR 則是藉由感知模組偵測周遭變化,使其可運行於具有隨機性及未知性的半開放環境,來擺脫以上固定路徑之限制
一個完整的 AMR 任務流程,包含了定位與導航兩項重點技術,並結合後台管理平台:首先,需由後台管理系統指派任務資訊,其中包含了 AMR 需要執行的任務指令、目的地座標點、並採用不斷更新的點數據與參照地圖(預先地圖建置)進行比對以計算出AMR在地圖中的位置等相關訊息(定位系統),執行任務的同時,AMR 身上所裝設的感測器(如光達、相機等)則會不間斷地發送環境感測資料予 AMR 進行障礙物偵測與本機周圍環境狀態資訊更新,藉以實現遇障礙物時需停止、自主繞越、或重新規畫路徑之選擇,並使 AMR 得以動態規劃及校正執行過程直至完成任務(導航)。
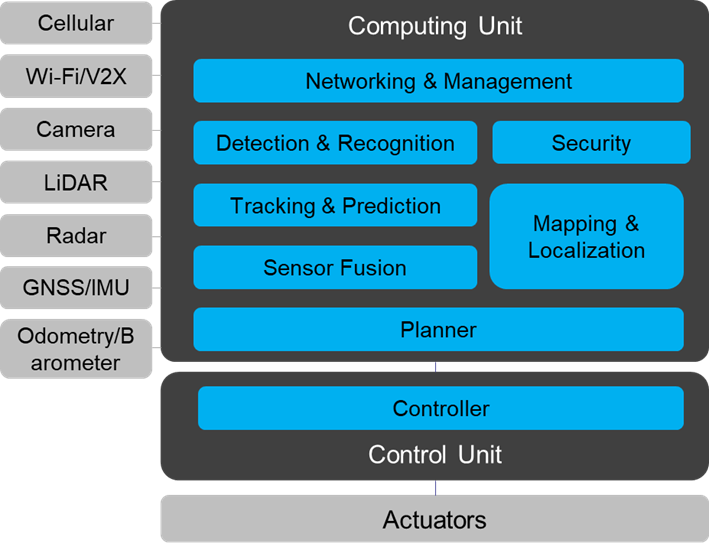
圖1 室內/外型AMR共通平台技術架構
二、 光達定位技術
當 AMR移動時,光達會持續地掃描周圍環境,並將新的點數據與參照地圖進行比
對。通過對比新的測量點與地圖上的特徵,定位演算法可以計算出 AMR 在地圖中的位置。通常光達有分二維或三維之光達,儘管目前市面上已有很多成熟的二維光達定位技術應用,如掃地機器人、送餐機器人及機場導覽機器人等,但由於一些二維光達先天技術上的限制,導致AMR只能獲得周遭物體單一高度的資訊,無法偵測高於或低於二維光達架設水平高度的障礙物,例如:懸空物體、路面低矮突出物,進而使AMR在人群中移動時產生安全上的隱患;此外,二維光達對於平面特徵較不明顯的環境,容易產生無法準確定位之缺點,例如:環境單調、長廊效應區域、戶外部分角度或距離超出感測器可感測之環境,特別是在大型的工業廠區,場景會是相同的走道、相同的機台、相同的貨架,以及超出二維光達有效感測距離的長廊;同時戶外相較室內環境缺乏大範圍的牆壁資訊,在固定水平高度上很難有可以參照的特徵訊息供精準定位。
為了改善二維光達定位之缺陷,多數會與其他感測器所提供的感測訊息融合使用,如里程計、慣性測量單元,然而這些額外感測訊息會隨運行時間產生累積誤差。當融合後的感測資訊無法準確反映周遭環境時,演算法就容易產生定位飄移,導致AMR不在所設定之路線上移動,看起來像是迷路的孩子;也因此在上述場域會傾向使用三維光達收集點雲數據,供三維定位演算法來實現更全面的環境感知和定位能力。但透過三維光達定位技術在大範圍戶外場域精準定位會遭遇下述三項挑戰:
- 因三維資料量龐大,建圖演算法需要長時間的計算迭代。
- 建圖成功率會因場域增大而隨之下降。
- 需要較大的隨機存取記憶體(Random-access memory, RAM)供存取。
為了克服三大挑戰,工研院資通所研發圖資建置/縫合技術、圖資切換技術作為對應策略;除了能夠縮短地圖建置時間及提高整體建圖成功率,也讓AMR得以具備在戶外/室內不同場域間自主定位導航之能力。
首先,利用三維光達錄製整個運行場域的點雲資料集,並透過所開發之模組離線建置整個環境點雲地圖,不但可完整利用建圖演算法,又可大幅減少因SLAM線上即時計算需求而被捨棄的有效點雲特徵資料。對於三維參照地圖上缺少的區域,可重新錄製該範圍的點雲資料集產生局部三維參照地圖,藉由縫合技術將圖資完善;尤其是在室內/戶外環境的差異,可以利用圖資建置/縫合技術將室內外地圖無縫地建置成一張完整地圖,如圖2所示。
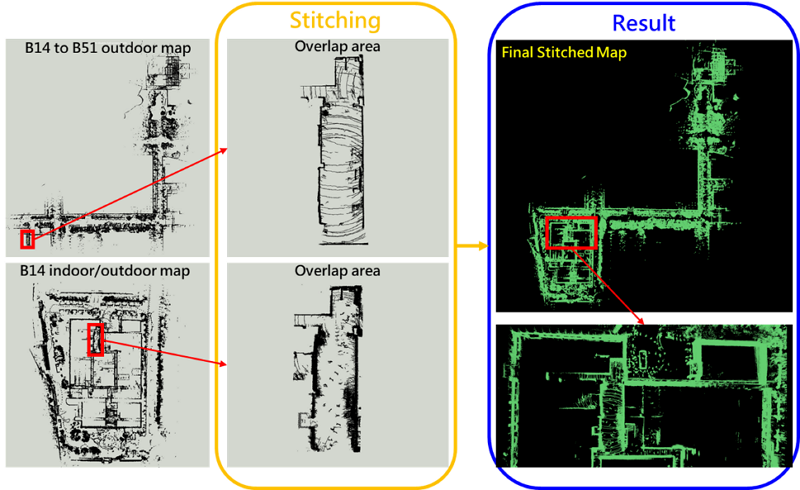
圖2 圖資建置/縫合技術
技術特色
室內外AMR具備優勢:
- 佈建成本低
- 路線彈性高
- 運作效率高(停止vs. 繞越)
相較於室內環境追求公分等級的定位精度,戶外場域則是追求可靠與即時性的定位能力
戶外型自主移動機器人之挑戰與相關策略,在硬體上將二維光達升級為三維光達,也開發相關圖資技術來建置室內外通用的三維地圖,同時導入圖資切換技術使AMR能夠運行在不同樓層,而在更高精度的定位需求上採用了二次定位方法來優化定位表現。
應用實績
1.國家圖書館 - 自動還書AMR
國家圖書館於台北總館率先導入自動還書AMR服務,使讀者可以跳過換證進入館內步行至服務台的過程,直接在館方設定的戶外還書點歸還借閱的書籍,大幅增加還書的便利性,未來此AMR將於國圖南院正式運作施行,徹底展現跨越建築物間之戶外AMR運行能力。同時,該AMR可在人行道上行走,如同人的行為動作,若遇到人潮會採取暫停或避開的動作,而若有腳踏車或固定物件之阻擋時,也會依其當時狀況,採取暫停或主動繞道的策略;而當AMR在電量過低、或還書箱滿時,則可自動導航回服務台,途中會隨機遭遇動態自主避障、狹窄殘障坡道、戶外/室內無縫切換等場域挑戰,其中的狹窄殘障坡道為主要克服的難題,因機身為了裝載書本設計較為龐大,為了行走狹窄的殘障坡道,需要極為精準的定位,以防碰撞坡道兩旁的扶手。圖 3 為自動還書 AMR 於實測時所發生之各種複雜情境。

圖 3 國圖台北總館場域實測
2.統一超商 - 自主送餐AMR
與統一超商合作,在高雄軟體園區引入 AMR 日常送餐,化身為小小外送員,AMR 外送路線如圖 4,從高雄軟體園區 C 棟的統一超商裝載商品,一路行駛,經過高低斜坡、高軟園區 A 棟中庭,到達電梯區,等待搭乘電梯,可將商品送至 1 到 12 樓所有的住址。途中遇到的困難包括:上下斜坡、人來人往的群眾、搭乘電梯、玻璃門等。其中運用到了大型場域建圖技術、導航避障功能、偵測 AprilTag 進出電梯及與後端通訊之技術,成功讓 AMR 不只在平面室內移動,可以到達不同樓層及戶外空間;目前為試營運期間,後續將會擴大 AMR 運行的範圍至穿越馬路。
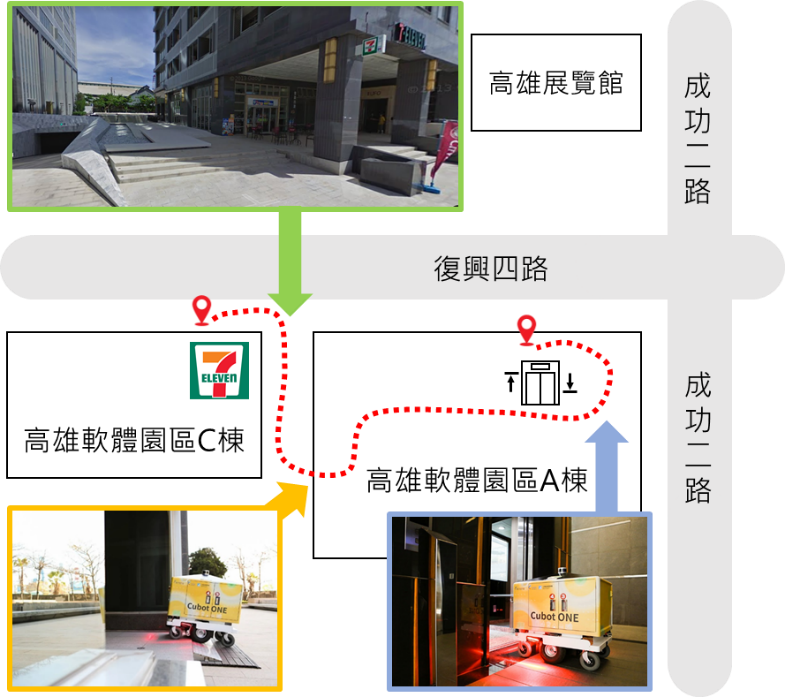
圖 4 AMR路線圖
衍生應用範圍
商場、校園、醫療機構、工廠廠區/園區等…….