The Development of Vehicle AI-ADAS Technology and Application
技術簡介
AI-ADAS技術整合光達、雷達、攝影機等元件,具備深度學習影像辨識、多重感知融合、即時事件推理等關鍵核心技術,搭載聯網自駕巴士,運用於新竹縣高鐵自駕接駁服務。
自2010年起,工研院與新竹縣政府、科技之星、車王電子及銓鼎科技聯手推動新竹縣高鐵自駕接駁運行實驗計畫,針對無人載具科技(Proof of Concept, POC)與服務(Proof of Service, POS)進行驗證測試,此計畫在汽機車混合車流之繁忙市中心道路進行測試,並搭載工研院研發之車聯網(Cellular Vehicle-to-Everything, C-V2X)技術,整合路側通訊、感測器與交通號誌等資訊,減少自駕車偵測盲點,提升自駕運行安全,此技術更曾榮獲2019年智慧運輸系統世界大會(ITS World Congress)產業成就獎與美國愛迪生(Edison Awards)銀牌獎。
本計畫共計四部自駕巴士投入驗證測試,每部自駕巴士搭載八顆相機與三顆光學雷達感測器,分別配置於車頭、車側以及車體後方,如圖1所示,為提供自動駕駛控制系統於道路上穩定轉向、障礙物繞行與煞停等功能,工研院所發展環周感知次系統,整合光達、雷達、攝影機、衛星定位、慣性導航、C-V2X等感測與通訊元件,具備深度學習影像辨識、多重感知融合、即時事件推理等關鍵核心技術,並針對台灣與亞洲特殊道路環境進行設計(如複雜號誌路口、汽機車混流、大雨),有效偵測道路物件,大幅擴增車輛環周感測區域,其環周感知次系統模組架構如圖2所示。

圖1 工研院聯網自駕巴士
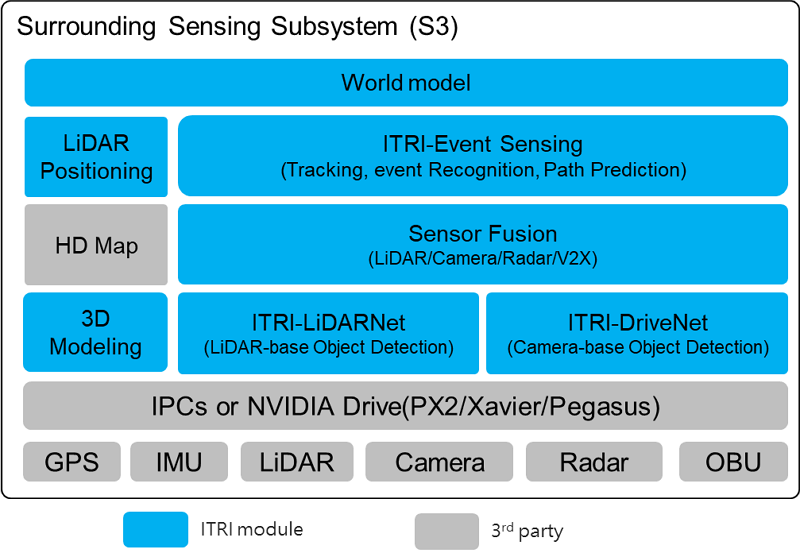
圖2 環周感知次系統模組
技術特色
- 即時影像深度學習物件偵測技術
提供有效定位物件之二維座標,精準辨別道路上物件,如行人、汽車、卡車、巴士、機車與腳踏車等類別資訊,亦進行偵測模型架構調整,擴增三角錐物件類別偵測,供自駕車遇道路工程施工時,安全地繞越行駛。同時,本技術也進一步結合物件追蹤技術,優化運算效能,降低系統負載量,提供連續且穩定之物件感測資訊,有效提升感測知融合技術、車輛控制技術之行車安全性。
- 光達深度學習物件偵測技術
光達深度學習物件偵測技術使用多顆光學雷達的點雲資料作為輸入,並結合即時影像與光學雷達之物件偵測技術,除了能發揮即時影像物件偵測的長處,供影像相關演算法應用,也能透過光學雷達使得三維空間物件框選取更貼合、定位更精準,提升自動駕駛車輛行駛之可靠性。
- 感知融合技術
聯網自駕巴士搭載多顆相機與光學雷達感測器,採用Late-fusion方法融合多感測器物件偵測資訊,提供自動駕駛控制系統於道路上穩定轉向、障礙物繞行與煞停等功能所需之障礙物感測資訊,主要作法是取得同步時間之光學雷達與即時影像輸出,並透過即時影像與光學雷達坐標系投影轉換矩陣,將光學雷達資訊投影至相機坐標系,經過交集聯集比(Intersection over Union, IoU)找出對應之物件,基於融合決策機制篩選出最終目標物件框資訊。本技術能有效偵測道路物件,提供精準的行人、車輛物件識別,以及物件大小與座標定位資訊,並大幅擴增車輛環周感測區域,提升自動駕駛車輛行駛之可靠性。
- 事件推理技術
事件推理技術主要基於感知融合軟硬體及與深度學習影像辨識的結果,進行即時預測物件動態道路事件之推理,並可透過預測行人是否穿越道路的意圖,在行人運動行為發生變化前提早反應,產生更為緩和且接近一般駕駛的減速行為。主要作法是由預測模組產生鄰近車輛是否切入自駕車車道或行人穿越意圖之機率,並配合三維物件偵測提供的位置與速度資訊,同時導入行車方向、車身與車道中線/分隔線距離,大幅提升物件變換車道時預測機率,進而提早自駕預警減速的時間點,藉此優化剎車控制。
- 號誌時相與推播
有效運用號誌時相可改善交通事故,近期行人於行穿線發生事故事件頻傳,造成國外對於台灣行人地獄的不良觀感,交通部於2023年5月全面推動「行人專用時相」和「行人早開時相」,該做法為短期內避開人車衝突最有效的方法。「行人專用時相」就是讓行人全部走完,車輛再行駛,設置在十字路口,各方向的行人綠燈會同時亮起,行車號誌則全為紅燈,達到人車分時分道;至於「行人早開時相」,則是行人綠燈提早幾秒亮起(一般為5至10秒),行車號誌再亮綠燈,以利行車轉彎時,能清楚看見已走在行人穿越線的行人,避免因視線死角造成事故。此外,推播則是運用無線通訊技術,將號誌時相資訊無線傳遞至行車電腦上,當駕駛者前方視線被大車遮蔽或距離過遠看不清號誌燈號時,仍可清楚知曉前方路口之號誌,做為行車加減速與煞車之參考。
技術規格
針對各階段自駕功能技術規格:包括定速巡航(cruise control)、車道維持(lane keeping control)、自適應性巡航(adaptive cruise control)、緊急煞車(emergency brake control)、預警式煞車(preventive brake control)、繞越障礙物(obstacle overtaking control)、變換車道(lane changing control)、路口通行(intersection passing control)、號誌遵守(traffic light waiting control)、精準站點停靠(precision docking control),以及左右轉控制(left/right turn control)等進行研擬,如圖3所示。
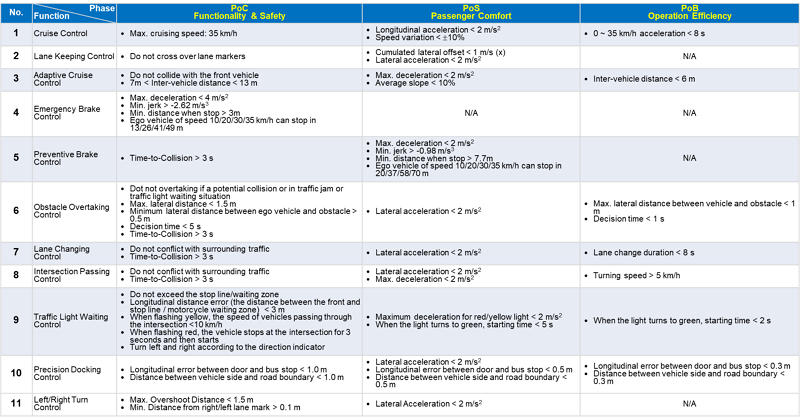
圖3 新竹縣高鐵自駕接駁運行實驗計畫測試規格
目前已完成新竹高鐵往返國際AI智慧園區日夜間自駕POC與POS測試(時速最高可達30km/h),同時亦針對特殊情境的精準度進行優化,包括加強不同天氣場景資料蒐集與訓練,以改善夜間場景和雨天場景,因應道路上各式光源變化與雨滴導致辨識不穩定的情形,此外亦進行偵測模型架構調整,擴增三角錐物件類別偵測,以供自駕車遇道路工程施工時,可安全地繞越行駛。
應用範圍
商場、校園、醫療機構、工廠廠區/園區、社區等