 自駕車發展過程中,如何於行駛過程中具有安全防護,降低交通事故的發生率是首要之務。
自駕車發展過程中,如何於行駛過程中具有安全防護,降低交通事故的發生率是首要之務。由於自駕車浪潮的帶動,如何於車輛行駛過程中具有安全防護,自駕車首應判斷要衝撞載人的巴士或是汽機車,以維護道路安全,將是自駕車技術發展過程中的重要議題。本文將探討如何提升自駕車的行車安全,所採取的關鍵技術即為V2X,自駕車與車聯網V2X技術兩者間的關係日益密切,自動化駕駛主要應用於降低人為錯誤所導致現行道路安全;而車聯網V2X技術則是應用車間、車路與基礎建設資料傳輸,提升行車安全自動化的解決方案。
V2X技術發展動機與趨勢
根據世界衛生組織所提供的統計資料,全球每年因車禍而喪生的人數大約有120萬,受傷的人數在5,000萬左右。1990年的各類死亡原因當中,車禍只排第9位,而美國交通部預測,到2020年,如果汽車交通系統的安全措施沒有顯著提高,車禍所導致的死亡人數會升至死亡原因第3位。為了提升交通系統的安全性和智慧化,V2X智慧交通的系統理念已逐漸成熟興起。V2X智慧交通可以利用新一代的V2X通訊技術和雲端資料處理能力,提高交通系統的整體效率,降低能源損耗,增加運輸的安全和便捷。
美國聯邦政府已針對無人駕駛車輛制定安全標準,有些法規也納入諸如Tesla汽車的先進駕駛輔助系統,即使自動化等級很高也會要求駕駛座有人監督。美國政府希望與Uber、Alphabet等科技巨擘在內的開發商攜手合作,而非限制其發展,無人駕駛車所關注的要點包括:車輛感知與反應功能、車輛處理技術與故障情況排除的能力、數據記錄和資訊分享能力、使用者隱私、防駭等。
自駕車發展與車聯網V2X系統的布建尤以美國最為積極,有鑑於交通事故傷亡造成人員、家庭損失,因車禍死亡每年損失的GDP達3%,美國已在2016年底宣布啟動立法程序,預計自2020年起,強制要求所有新出廠的小型車輛,包含輕型貨車必須安裝V2V(Vehicle-to-Vehicle)車間通訊設備。由於美國堪稱是全球車市指標之一,一旦立法完成,將加速技術開發並帶動產業動能,促成智慧化運輸環境成形,全面引爆車聯網商機。研究機構ABI Research的調查指出,超過80%業者相信,美國將在2020年完成所有新車強制裝機法規上路。2024年時,全美預計將有一億輛新車安裝V2V設備。未來10年,歐美市場車間通訊相關產值保守估計可達170億美元,若再加上後裝舊車市場、路側建置、應用服務等市場,預估可帶來的產值將更可觀。為搶攻2020年強制裝機商機,全球各大車廠已提前開跑。2014年九月,美國通用汽車(GM)於底特律舉行的ITS年會開幕典禮上,宣布2017年生產的Cadillac CTS系列將具備V2V通訊技術;日本豐田汽車(Toyota)亦在官網上宣布,2016年銷往美國與日本新車將全面導入車聯網,預估一年將有400萬輛商機。
V2X關鍵技術為串聯人、車、路與平台,強化行車安全。回顧車聯網V2X技術發展演進,第一代為獨立運作之系統,如娛樂、獨立導航系統,缺乏或僅有少部分無線通訊功能;第二代透過手機向駕駛傳遞應用服務,以GPS(Global Positioning System)為基礎提供駕駛行車安全及vehicle centric support應用服務,如GM OnStar、KDDI G-Book;第三代其關鍵技術為V2X整合V2V (Vehicle-to-Vehicle)、V2R (Vehicle-to-Roadside)、V2I (Vehicle-to-Infrastructure)與V2P (Vehicle-to-Pedestrian),提供自駕車行車安全、便捷與舒適,可運用無線寬頻多樣性應用服務,達到自駕車聯網的功能。
V2X安全警示系統之應用
自駕車結合V2X行車安全技術有很多應用情境,有些是現在已經看到的,有些是預測的。毋庸置疑,提高交通安全是最主要的應用,其中包括:1)自駕車當偵測到有危險臨近,例如前方有障礙物時,能夠及時提醒其他車輛;2)自駕車能夠告知其他車輛自己所行進的方向,以幫助其他車輛做更準確的判斷;3)靠近交叉路口時,向其他車輛提醒;4)駛離高速公路時,向其他車輛提示;5)臨時/突然停車的預警;6)自駕車變換車道時的提醒。
自駕車整合V2X技術,可具備十字路口防碰撞警示Intersection Movement Assist(IMA)、電子煞車燈警示Extended Electronic Brake Light(EEBL)、左轉防碰撞警示Left Turn Assist (LTA)、前車碰撞警示Forwarding Collision Warning(FCW)等四種安全應用,如圖1所示。
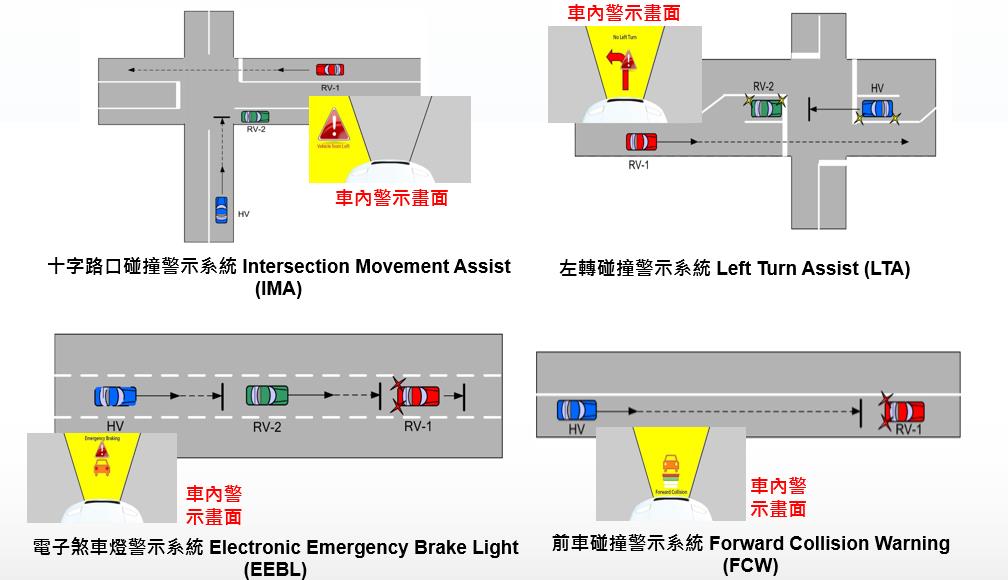 圖1:自駕車結合V2X行車安全警示應用
圖1:自駕車結合V2X行車安全警示應用IMA、LTA、EEBL、FCW四種V2X安全警示應用,其應用設計原則如下:
IMA十字路口防碰撞警示:此應用主要目的為協助駕駛避免於路口發生碰撞,並警告即將違反交通號誌或停車標誌的駕駛(如搶黃紅燈)。IMA應用亦可結合路側基礎建設(如路側單元、雷達、交通號誌)與車內車機設備兩種元件共同運作。當裝有OBU通訊設備的車子接近裝設有RSU(Road-side Unit)通訊設備的十字路口,其車上設備可接收到含有路口地理位置、全球衛星定位系統(GPS)差分校正資訊、號誌狀態(如綠燈剩餘秒數)與雷達偵測到車輛的訊息。車內OBU設備透過所接收的訊息判斷駕駛是否處於危險狀態並提醒駕駛。駕駛可透過車內螢幕預先得知路口資訊(如號誌剩餘秒數),此資訊可做為通過路口時加減速的參考依據。以下為IMA應用為了提升直行車輛與橫向車道左右來車行車安全,其警示條件設計如下。
- Phase 1–HV(Host vehicle)在路口停止時,RV(Remote Vehicle)於橫向車道逼近路口,HV UI(User Interface)顯示IMA畫面來車。
- Phase 2–RV與HV於前方交會,且兩車碰撞時間TTC(Time-to-Collision)<5sec及差距低於3sec,HV UI以IMA畫面和聲音警告,如圖2所示。
 圖2:十字路口防碰撞警示畫面(左側來車情況)
圖2:十字路口防碰撞警示畫面(左側來車情況)EEBL電子煞車燈警示:此應用適用於當前方車輛發生緊急煞車,特別是後方車輛被前方大型車輛(卡車或聯結車)遮蔽視線,前方車輛將其自身的電子煞車資訊透過廣播的方式傳遞給後方的車輛,以提醒後方車輛駕駛人留意,避免發生連環車禍。針對前方車輛發出電子煞車資訊的時機點則是依據車速變化或煞車訊號,其煞車資訊也可與適應性巡航控制系統(Adaptive Cruise Control System, ACCS)相結合。當後方的車輛接收到緊急煞車訊息,則透過車內螢幕顯示警示畫面或發出警示音提醒駕駛。以下為EEBL應用為了降低與前方及前方相鄰車道車輛緊急煞車造成碰撞的風險,其警示條件設計如下。
- Phase 1–RV在HV前方或相鄰左右車道且HV擷取到RV煞車燈號,HV UI顯示前方煞車警示。
- Phase 2–滿足上述且減速度>0.5g,HV UI以EEBL緊急煞車畫面和聲音警告駕駛,如圖3所示。
 圖3:電子煞車燈警示畫面.jpg
圖3:電子煞車燈警示畫面.jpgLTA左轉防碰撞警示:此應用希望避免駕駛人於左轉時,因開車視距受到對向左轉車輛之阻隔,致使發生與直行車發生碰撞之機會。車內針對左轉路徑橫越衝突點時會發出警示。以下為LTA應用為了提升左轉車輛與對向來車行車安全,其警示條件設計如下。
- Phase 1–HV於路口處準備左轉且打左轉燈,此時對向車道有來車,HV UI顯示LTA畫面。
- Phase 2–HV於路口左轉且與對向來車兩車TTC<5sec及差距低於3sec,HV UI以LTA畫面和聲音警告,如圖4所示。
 圖4:左轉防碰撞警示畫面
圖4:左轉防碰撞警示畫面FCW前車碰撞警示:此應用的主要目的為協助並警告後方駕駛,於直行道路上避免與前方車輛發生碰撞。後方車輛的OBU接收來自前方其他車輛的基本安全訊息(如座標位置、車速、方向、偏航速率與加速度),透過所接收到的資訊可與自身車輛的位置、車速與道路資訊(如地圖資料)比對並判斷是否會與前方車輛發生碰撞,其判斷結果將透過螢幕顯示或警示音提醒駕駛。以下為FCW應用為了降低與前方車輛距離過近造成碰撞的風險,其警示條件設計如下。
- RV在HV前方同向並且停止、緩慢前進或煞車,TTC<5sec,HV UI以FCW畫面和聲音警告駕駛,如圖5所示。
 圖5:前車碰撞警示畫面
圖5:前車碰撞警示畫面V2X安全警示系統
自駕車緊急狀況警示及避免,如何運用感測、通訊、軟體技術,讓自駕車可以掌握車子周圍的各種狀況,尤其是偵測範圍以外的危險,並在最短時間內協助車輛反應,進而提高行車安全?於是自駕車結合V2X行車安全警示就變得相當重要,自駕車透過V2X行車安全輔助,其系統可分為三部分:路側端(RSU, Roadside Unit結合雷達等偵測設備)、自駕車端(OBU)以及後台端系統(Backend Server),其系統通訊與介接,如圖6所示。圖6系統通訊與介接示意圖,自駕車上的OBU可提供路徑預測軟體演算法、應用警告判斷軟體演算法,以能即時於事件發生前提出預警,並做車輛煞停動作。自駕車整合V2X技術,可具備十字路口防碰撞警示Intersection Movement Assist(IMA)、電子煞車燈警示Extended Electronic Brake Light(EEBL)、左轉防碰撞警示Left Turn Assist (LTA)、前車碰撞警示Forwarding Collision Warning(FCW)等四種安全應用。
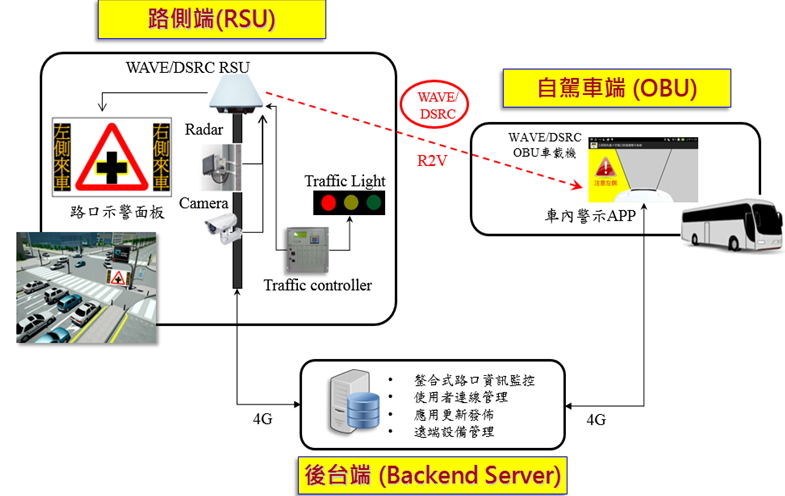 圖6:自駕車結合V2X行車安全警示系統通訊與介接示意圖
圖6:自駕車結合V2X行車安全警示系統通訊與介接示意圖圖7為系統硬體架構圖,透過RSU路側單元轉換雷達掃描路口之周遭車輛資訊及具備短距無線通訊DSRC(Dedicated Short Range Communication)通訊功能之車輛,將車載資訊封裝於基本安全訊息中(SAE J2735 BSM, Basic Safety Message),透過DSRC專屬短距通訊技術定期廣播,當自駕車OBU收到此訊息並解析後,與本身車子的資訊經由安全防撞系統演算法判斷是否會產生碰撞來做車輛自動煞停的動作,換言之,即當有裝機自駕車輛通過路口時,其自駕車OBU端能接收到所有車輛之動態 (包含位置、速度、方向等)。
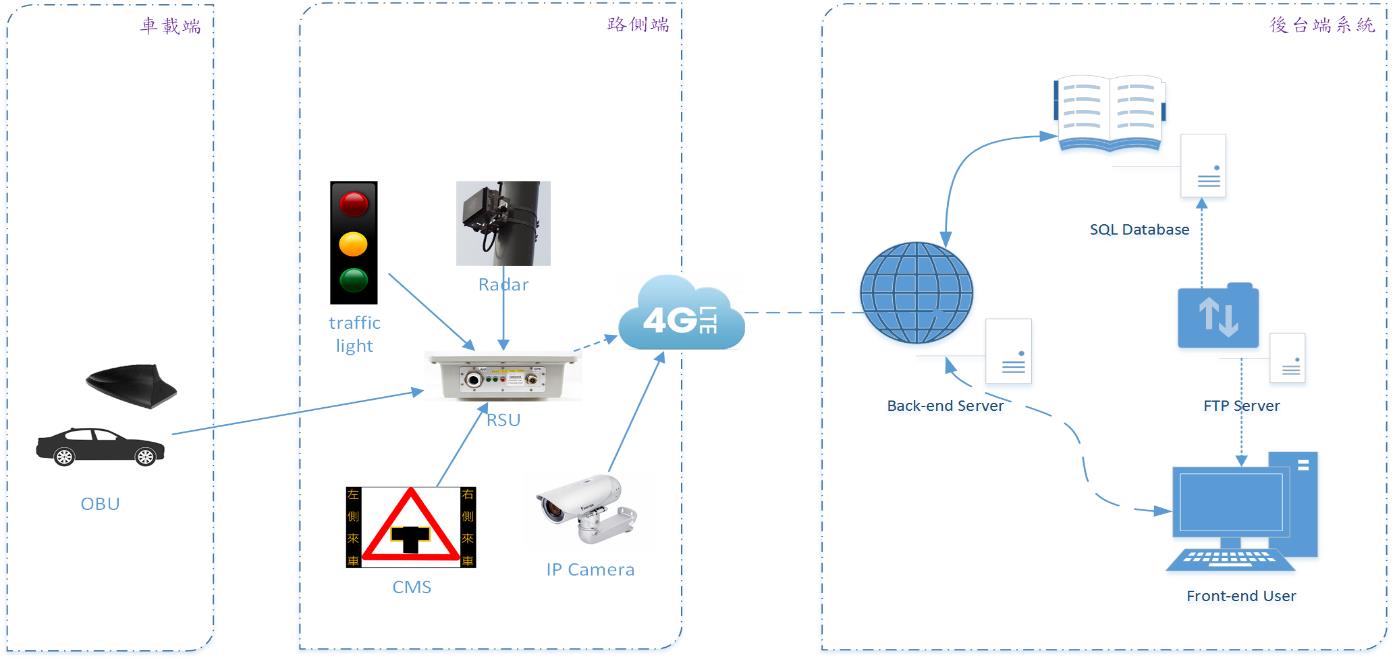 圖7:自駕車結合V2X行車安全警示系統硬體架構圖
圖7:自駕車結合V2X行車安全警示系統硬體架構圖自駕車OBU端系統包含以下功能:
- 具備IMA、LTA、EEBL、FCW碰撞警示演算功能
- 具備計算與周遭車輛相對位置功能
- 具備計算與周遭車輛相對速度變化功能
- 具備偵測本身車輛燈號狀態功能
- 具備演算與周遭車輛碰撞位置功能
- 具備演算與周遭車輛碰撞剩餘時間功能
- 具備接收周遭車輛煞車訊號功能
- 具備接收與傳送封包至周遭通訊單元封包功能
- 具備與車輛控制系統連結,提供自動煞停功能
RSU路側端系統包含以下功能:
- 雷達資料過濾演算法與將相對資訊轉換大地經緯度之功能
- 路口防撞演算法與看板警示功能
- 路口多個雷達資料整合並追蹤物件
- 接收經過路口之OBU車載資料功能
- 路口號誌資料接收與解析功能
- 路口各設施資料彙整並傳送後台功能
後台端系統包含以下功能:
- 視覺化之即時路口狀態
- 自駕車OBU各項警示之接收功能
- 路口RSU管理功能
- 路口號誌資料接收功能
- 建立針對路口設備資料之關聯式資料庫
在無線通訊技術(如:DSRC、4G/LTE)的發展下,帶動自駕車結合通訊相關的應用與發展(V2V、V2I相關應用)。因應新服務的發展,既有自駕車輛與路側設施將產生相關通訊模組或設備之需求,因此相關通訊晶片、模組與產品的設計、製造即成為我國業者發展的機會點所在。且針對V2V Safety等之應用,需整合包含車載機、路邊裝置等,以提供一定品質之車載服務,將帶動一連串含系統整合業者等廠商參與。此外,有鑑於交通事故造成的損害不斷擴大,因此行車安全逐漸被重視。近年來,自駕車開發商不僅強攻車載資通訊平台,亦開始加碼投資安全應用和移動定位的新技術發展,例如歐洲的eCall、北美和中國大陸積極推展的ITS,以及涵蓋自動巡航、前方碰撞警示、車道偏移、盲點偵測及停車輔助系統的ADAS(Advanced Driver Assistance System)方案,未來自駕車整合V2X通訊技術與應用,將會成為主流的市場。
相關連結: 若影片無法顯示,請點選此連結(另開新視窗)
相關連結: 回_171期 無人載具技術專輯