前言
行車透視(See-Through)是一種車輛先進駕駛輔助系統(Advanced Driver Assistance Systems,ADAS)的安全應用之一,它利用車間通訊之低延遲和影像處理技術,透過前後車輛之間的無線通訊,傳送行車影像串流,允許後車駕駛獲得前車的視覺影像來擴展其視覺感知,進而增強駕駛的安全性和行車體驗,主要目的是解決行車視覺障礙的問題,特別在排成串之遊覽車隊行駛、物流車隊行駛,後車駕駛可輕易掌握前方路況,針對此一應用情境,國外廠商已競相投入研發。本文將探討V2X See-Through應用的原理、技術和潛在應用,並詳細介紹如何增強駕駛者的視覺感知,提高行車安全性。
2023 TechDay展示照片
精彩內容
1. V2X車間通訊技術
2. 影像串流與縫合技術
3. V2X See-through應用案例 |
V2X車間通訊技術
行車透視的核心工作原理涉及V2X車間通訊技術(Vehicle-to-Everything)的應用,運用車輛之間的即時資訊傳輸,使得前車可以將其行車視覺影像流傳送給後車。V2X車間通訊技術具有幾個關鍵特點,包括需要極低的延遲,以確保影像串流資訊在即時情況下被傳送和接收;具有高度的安全性,以防止滲透、惡意干擾或資訊洩露;以及不同製造商和型號的車輛必須能夠協同相互通訊。V2X技術主要分為下列幾項類別:
- V2V(Vehicle-to-Vehicle)通訊:V2V通訊允許車輛之間直接互相通訊,無需中介或基地站。這種通訊在交通事故預防方面非常重要,因為它可以提供即時交通資訊,如距離、速度和行駛方向。透過V2V,車輛可以相互協作,共同識別和回應潛在危險,從而提高道路安全性。
- V2I(Vehicle-to-Infrastructure)通訊:V2I通訊涉及車輛與交通基礎設施之間的通訊,包括交通號誌燈、道路標誌、路側感測器等。這種通訊可以幫助車輛避免塞車,並優化路線,從而提高交通效率。V2I還可以提供即時交通流量和道路狀況資訊,幫助駕駛者做出明智的交通決策。
- V2P(Vehicle-to-Pedestrian)通訊:V2P通訊允許車輛與行人之間的通訊。行人可以配備V2X設備,使車輛能夠偵測他們的位置和行動。這在提高行人安全性方面具有潛在價值,因為車輛可以警告駕駛者有行人出現,並採取適當的行動。
- V2N(Vehicle-to-Network)通訊:V2N通訊允許車輛連接到互聯網,從而實現更多的應用,包括音頻和視頻串流,以及雲端服務。
V2X車間通訊技術的主要目的就是增進交通安全、減少塞車、車禍發生、降低駕駛/行人傷亡,進而實現自動駕駛,而V2X被認為是未來推動智慧運輸系統(Intelligent transportation system,ITS)關鍵因素。
影像串流與縫合技術
影像串流與縫合技術是行車透視的另一個重要技術。前車透過V2X技術將本身的行車視覺影像傳送給後車,行車影像包括前車的駕駛視野,路面條件、以及交通狀況等重要資訊。後車會接收並運用影像縫合技術,將前車的行車影像與自身視野無縫拼接,形成一個整體的具透視之視覺畫面;後車之駕駛者因此能夠看到前車的視覺視角,即使前方有障礙物或其他視覺障礙,也能清晰感知道前方路況。影像串流技術的工作原理基於數位壓縮、編解碼和網路傳輸的原則,通常包括以下步驟:
- 影像擷取:這是行車影像串流的起點,其來源可以是相機、攝影機、行車記錄器、手機相機或其他影像設備。這些影像被數位化,並轉換成可傳輸的數據。
- 影像編解碼:捕獲的影像被編碼成壓縮格式,以減少資料量,同時保持影像品質。編碼過程包括壓縮技術,如H.264、H.265(HEVC)等;解碼則是接收端將資料還原為可視影像的過程。
- 網路傳輸:經過編碼的影像資料透過網路傳輸到目的地,這可以是一個遠端觀眾、另一個裝置或一台伺服器;傳輸可使用互聯網、車聯網、區域網絡或無線網絡,視應用情境而定。
另一方面,影像縫合技術使用先進的影像處理演算法,將前車提供的行車視覺影像與後車的實際視野無縫結合,以創建一個整體的、連續的視覺畫面,如此後車駕駛者就能夠看到前車行車的視覺視角,即使前方有障礙物或其他視覺障礙,這種增強視覺感知的能力可大幅提高後車駕駛者對路況的認知,有助於減少交通事故的發生。影像縫合技術的工作原理包括以下步驟:
- 現實世界影像擷取:通常使用車輛上的相機或攝影機來獲取車輛周圍的現實景觀。這些影像通常包括道路、其他車輛、路標和交通標誌等。
- 虛擬資訊產生:同時虛擬訊息,如導航指示、交通警告、交通號誌燈等,被產生或提取,以便在視野中顯示。
- 影像縫合與對齊:影像縫合技術將前車提供的行車視覺影像與虛擬資訊,無縫地融入後車的行車影像中,並保持它們的邉界、角度和尺寸都是一致的。
- 顯示與呈現:疊合的影像透過特殊的顯示設備,如頭戴式顯示器或車輛儀表板顯示器,呈現給駕駛者,使其能夠同時看到疊合和現實行車資訊。
影像串流與縫合技術提供給駕駛者一種美好的駕駛體驗,加強駕駛者的視覺感知,清楚明瞭前方行車路況。
V2X See-Through應用案例
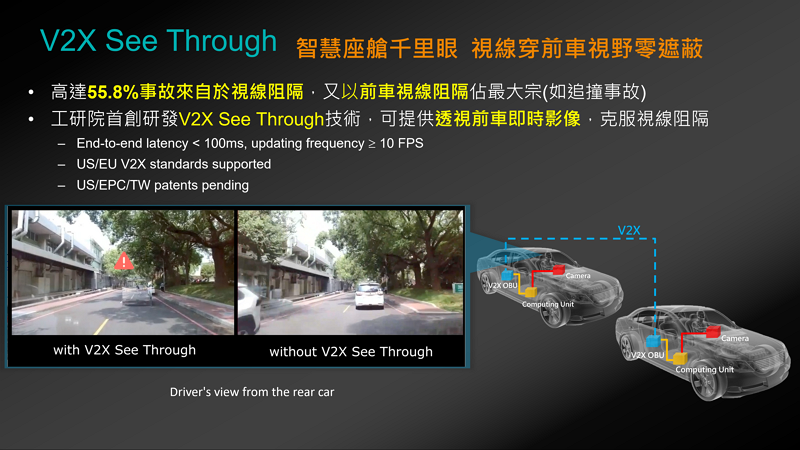
V2X See-Through應用的最終目標是增強駕駛者的視覺感知,進而提高行駛安全性,透過前方視野的即時畫面,即使在視線受限或複雜交通情況下,駕駛者也能夠更好地應對道路狀況,這對於減少交通事故、改善交通流動性、提高駕駛者的信心都具有重要意義。圖1為工研院研發V2X See-Through行車透視系統架構,前後車都包含有攝影機、運算單元與V2X車載機。前車之攝影鏡頭主要負責截取影像資料並傳送至運算單元進行物件辨識已決定出前方是否存在危險物件,運算單元之運算結果會連同影像資料藉由V2X車載機傳送至後車。而後車之鏡頭主要將截取到的影像傳送至運算單元以決定出前車車尾範圍尺寸,同時運算單元將V2X車載機所接收到的前車影像資料與危險物件資訊進行整合與判斷,當危險物件資訊有可能危害到後車駕駛行車安全時,則透視功能將啟動,後車運算單元將所接收到的前車影像資料透過影像縫合演算法疊加至前車車尾範圍,如此將形成穿透前車之效果。

圖1 V2X See-through行車透視系統架構
以下是工業技術研究院 V2X See-Through行車透視系統已實現之應用領域與未來潛在用途:
已實現之應用領域
1. 超車安全輔助
超車安全輔助旨在提高駕駛者在超車過程中的視覺安全性和信心,如影片1所示,當無行車透視輔助時,往往超車需要切至逆向車道以了解對向車道是否有其他車輛迎面而來,這時也伴隨著碰撞高風險;若有行車透視輔助功能,則可讓駕駛者能夠更清晰地了解超車狀況,以減少風險並提高超車操作的效率。
2. 防前方掉落物預警
防前方掉落物預警功能是一項旨在提高駕駛安全性之技術,如影片2所示,當無行車透視輔助時,前方若突然有掉落物掉落至車道上,則需要前車閃避後,後車才會察覺到掉落物,這時往往由於反應時間不夠,進而產生撞上掉落物之危險;若有行車透視輔助功能,則讓駕駛者能夠更及時地識別和應對道路上的障礙和掉落物,有助於減少事故風險。
3. 防追撞預警(前車急煞與行人衝出)
防追撞預警功能也是一項旨在提高駕駛安全性之技術,前車緊急煞車與行人衝出是常見追撞的發生狀況,如影片3、影片4所示,當無行車透視輔助時,前前方若突然有車輛緊急煞車或行人衝出,則前車採取緊急煞車後,後車這時往往由於反應時間不夠,進而產生追撞前車之危險;若有行車透視輔助功能,則讓駕駛者能夠更及時地識別和應對潛在的碰撞風險,有助於減少車禍和碰撞事件的發生。
未來潛在用途之應用
- 夜間駕駛:夜間駕駛時,視野受到限制,可能增加事故風險,行車透視應用可以提供額外的照明和視覺支援,改善夜間行駛的安全性。
- 複雜路況:在複雜的路況下,如道路工程、交叉口、擁擠的高速公路匝道等,駕駛者需要更多的資訊來做出正確的決策,行車透視應用可以提供即時的視覺指引,幫助駕駛者更安全地通過這些區域。
- 自駕車技術增強:行車透視技術也可以用於自駕車領域,自駕車需要具有高度先進的感知能力以確保安全駕駛,透過V2X通訊和影像縫合技術,自動駕駛可以更好地理解周圍車輛的行為,從而提高自動駕駛汽車的安全性和運作效率。
- 智慧交通管理:行車透視技術可以與智慧交通管理系統集成,以實現更智慧的交通流量控制,當交通管理機構具有即時影像數據時,他們可以更好地監測交通情況,並採取適當的措施來應對交通問題,例如事故或交通堵塞。
結論
行車透視應用是先進駕駛輔助系統(ADAS)領域的一項重要創新,它利用V2X通訊技術和影像處理技術,提供前所未有的視覺感知增強功能,透過實現前後車之間的即時資訊共享,以及影像串流和縫合技術的應用,實現行車透視應用。目前該應用與技術已有國外廠商進行相關研發,特別針對遊覽車隊行駛、物流車隊行駛之情境,進行測試與佈建,未來可進一步擴展至所有車輛,該技術的潛力令人期待,有助於交通更安全、行車更順暢。
參考文獻
[1] Bingjie Yuan, Yan-Ann Chen, and Shaozhen Ye, “A Lightweight Augmented Reality System to See-through Cars”, 2018 7th International Congress on Advanced Applied Informatics.
[2] Pedro Gomes, Fausto Vieira, Michael Ferreira, “The See-Through System: From Implementation to Test-Drives”, 2012 IEEE Vehicular Networking Conference (VNC).
[3] US 2021/0142526 A1, Jani Mantyjarvi, “Method and Apparatus for In-Vehicle Augmented Reality Visualization of Sensor Range and Field-of-View (FOV)”
[4] US 10726276 B2, Seong-won HAN, Woo-Jin Park, Dae-hyun BAN, Kyu-haeng LEE, Sangsoon LIM, “Method for providing a sight securing image to vehicle, electronic apparatus and computer readable recording medium therefor”.