工研院資通所 吳俊民
隨著多空間維度之無人載具的快速發展,使得高精度定位的需求日趨重要。而目前能夠達到近公分等級的定位精度有即時動態定位(Real Time Kinematic,RTK)與精密單點定位(Precise Point Positioning,PPP)兩大關鍵的核心技術。本文主要就即時動態定位技術建置系統整合驗證平台,並使用高傳輸且穩定的網路通訊,如4G或5G網路來鏈結參考台與行動台進行定位解算,此外,針對衛星訊號被遮蔽嚴重的區域開發以線性外插為基礎的位置預測補償機制並分別於實際場域進行定位精度與狀態驗證測試,從測試結果中,我們可以發現目前動態的定位精度可準確定位於行駛車道上,可達車道級定位(Lane-level Positioning),藉由開發的預測補償機制可以補償遮蔽區域的定位結果以達到行進軌跡不中斷。本系統平台的技術開發將可以做為未來無人載具應用整合的一個重要的依據。
精彩內容
1. 兩大高精度定位核心技術 穩定4G/5G通訊網路是運作基礎
2. 即時動態定位輔助技術 基於軌跡預測的動態補償法
3. 工研院即時動態定位系統 未來自動化無人載具應用服務之先聲
|
兩大高精度定位核心技術 穩定4G/5G通訊網路是運作基礎
1.即時動態定位技術
全球導航衛星系統(Global Navigation Satellite System,GNSS)已被廣泛運用於各領域之中。近年來,隨著自動化無人載具市場的蓬勃發展與衛星定位技術的快速發展,人們對快速且高精度定位的需求也與日俱增,高取樣率、高精度的定位測量技術被發展運用於高速移動物體之動態定位[1],將定位接收機搭載安裝於應用載具,即可藉以即時量測記錄載具的行進軌跡,達到高精度即時動態定位的目的。 為了提升定位的精準度至近公分等級的水準,GNSS動態定位資料大多結合地面固定觀測站(或稱參考台)的觀測資料進行差分(Differential)的解算定位,稱之為即時動態 (Real Time Kinematic,RTK)定位技術[2]。即時動態定位技術利用差分定位的解算方式,可以有效消除大部分衛星與接收機的定位時表誤差,對於參考台與接收機間的短基線範圍(約10公里內)的動態定位而言,能夠達到近公分等級的動態定位精度,這種技術對於區域性之動態定位的量測上有很大的助益[3-4]。但是隨著基線範圍增長,即時動態定位的定位精度也隨之降低,以致無法應用於較大範圍的高精度定位應用需求。此外,即時動態定位必須建置固定式的參考台來追蹤衛星,不僅增加建置的成本也降低其定位效率與便利性。
2.精密單點定位技術
近年來,另一近公分等級定位技術被發展與應用,稱之為精密單點定位(Precise Point Positioning,PPP)技術[5],精密單點定位不受基線長度之影響,可以藉由蒐集的衛星星曆、軌道與時表等資訊進行動態定位的直接解算,較具獨立定位解算的作業特點,無需額外建置參考台。但是也由於未組合成差分觀測資料,使得定位的部分誤差無法加以消除而導致精密單點的定位精度較即時動態定位方式為差,此外,精密單點定位的收斂時間往往需要數十分鐘也是一大問題[6],若能有效提升精密單點定位的動態定位精度並加速收斂時間,將更能應用在各領域的定位作業之中。 目前這兩大近公分等級的動態定位技術都必須使用到行動通訊進行資料傳輸與即時解算定位,因此維持穩定的4G/5G通訊網路是系統運作的基礎,此外,影響這兩大技術動態定位精度的主要誤差包含衛星軌道誤差、衛星與接收機時表誤差、大氣層影響之延遲誤差及未知整數周波數求解誤差等。為提升定位精度,如何取得高精度的衛星軌道資訊、時表修正量或使用篩選品質較佳的衛星觀測資料來降低大氣層等誤差影響,也都是提高動態定位精度的研究方向[7]。 由於即時動態定位具備技術較成熟、快速收斂時間可達近公分等級的高精度定位等特點,使得成為目前多數研究所採用的基本核心技術。本文對於使用建置於工研院11館的參考台與高取樣率的接收機執行即時動態定位之整合驗證,並藉由開發基於軌跡預測的動態補償法以補償衛星因環境遮蔽而無法定位解算的區域。
即時動態定位輔助技術 基於軌跡預測的動態補償法
1.即時動態定位的原理與挑戰
RTK是最先發展、也是目前最被廣泛運用的GNSS近公分等級定位精度測量方法,RTK主要採用了載波相位(Carrier Phase)與動態即時差分技術進行解算定位,可以達到在戶外場域即時取得近公分等級的定位精度,為高精準定位需求的應用,例如高精度圖資或各種高精度工程控制量測等提供解決方案。 以載波來傳送訊號,由於載波波長遠短於電碼,因此要達到高精度定位勢必要使用載波相位的觀測值,而RTK定位技術就是基於載波相位觀測值的即時動態定位技術,可以即時提供接收機的三維定位結果並達到近公分等級的定位精度。RTK基本架構如下圖1所示,主要將地面參考台(Base)所收集到的接收衛星觀測值與參考台精確座標等資訊,透過行動網路傳送到使用者的接收機(或稱行動台Rover)進行差分定位解算,而行動台除了接收參考台的資訊之外,自身同時也收集GNSS觀測資料,並在系統內組成差分觀測值進行即時性的處理加以消除時表誤差,同時解算出精準的定位結果,解算的取樣率則視接收機而定,本論文使用瑞士U-blox公司所開發的M8T單頻多星系的接收模組進行驗證,其取樣率最高可達10Hz(每100ms可提供一次定位結果)。
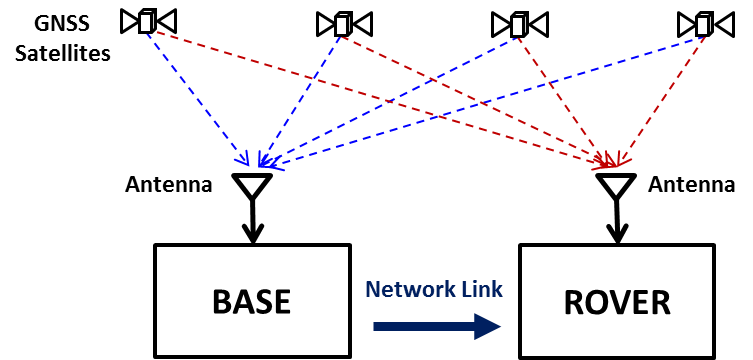 圖1 RTK基本架構的示意圖
圖1 RTK基本架構的示意圖如下圖2所示,為RTK基本運作方式的示意圖。行動台對於載波相位的觀測值進行二次差分運算消除大部分衛星與接收機時表誤差後,經過最小平方法(Least-square)估算得到近似的數據浮點解(Float),並在動態環境下進行未知整數周波數模糊度解析(Ambiguity resolution) [8]。在未知整數周波數解析後,即可計算出固定解(Fixed)後,即可即時的解算定位出近公分等級的定位結果。
RTK技術的關鍵在於使用載波相位觀測量,並利用了參考台和行動台之間觀測誤差的空間相關性,通過差分的方式除去行動站觀測資料中的大部分誤差,進而實現即時動態的高精度定位。
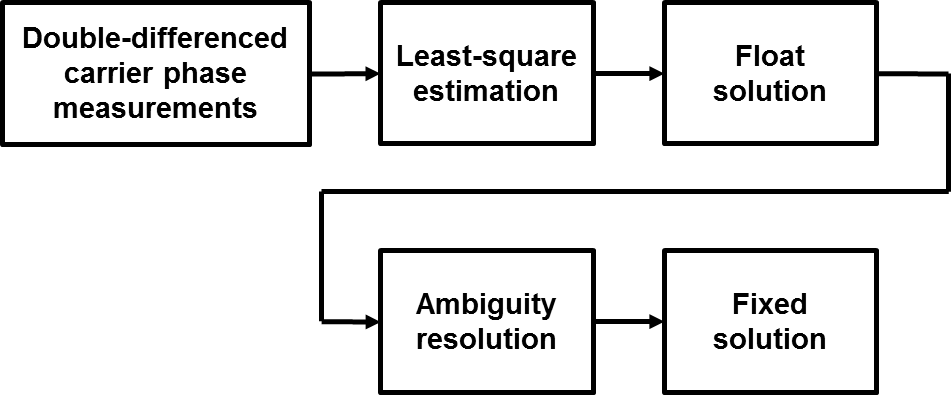 圖2 RTK基本運作方式的示意圖
圖2 RTK基本運作方式的示意圖RTK技術所面臨的主要挑戰包括下述兩點,一為RTK技術的關鍵在於資料處理與傳輸技術,RTK定位時參考台必須即時而快速的透過穩定的行動通訊網路把衛星觀測資料及已知參考台資料傳輸至行動台,而4G LTE行動網路的普遍性、穩定性與高資料傳輸率特點足以做為RTK技術無線傳輸之用。二是參考台與行動台間校正資料的有效作用距離,或稱為基線(Baseline)。由於GNSS誤差的空間相關性會隨著基線的增長而失去線性關係,因此在較長距離(單頻接收有效最大距離約10公里)情況下,即使經過差分處理後的使用者資料仍存在著較大的觀測誤差以致定位精度降低或無法解算。為改善這個問題,有研究者提出網路RTK技術,使用多個參考站組成的GNSS網路來估計一個區域範圍的GNSS誤差模型,為範圍內的使用者提供修正資料,且使用者收到的也不再單單是由某單一實際參考台的觀測資料,而是產生一個虛擬參考台(Virtual Base)和距離自己位置較近的某個參考格線的修正資料來解算定位[9],雖然可以改善RTK技術的測量範圍,但基礎系統建置成本與操作便利性仍待強化。
2. 基於軌跡預測的動態補償法
當衛星訊號遭遇建築物或樹木等環境遮蔽以致無法接收四顆以上衛星相位觀測值進行定位解算的情況,我們開發基於行進軌跡之線性外插(Linear extrapolation)動態補償法來進行受遮蔽區域的軌跡預測,如下圖3所示為基於軌跡預測的動態補償法示意圖。即時動態定位運作過程中,行動台接收機在Least-square估算後加入判斷是否存在近似解,若是則依照原先RTK基本運作方式求解Fixed定位結果;若否則進行線性外插預測的動態補償。
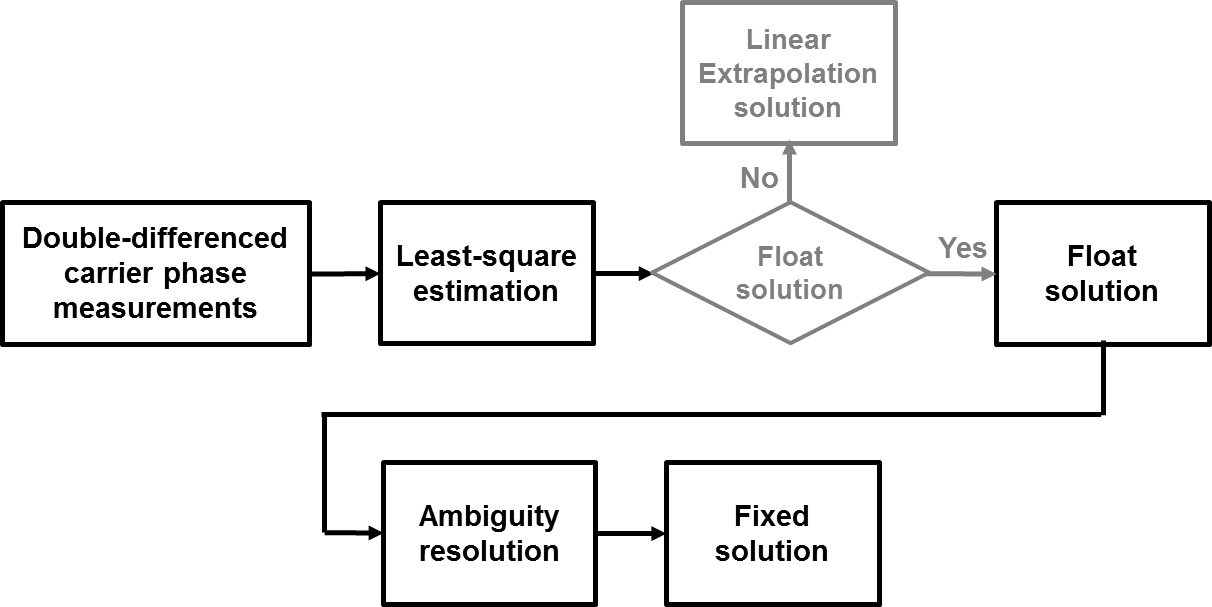 圖3 基於軌跡預測的動態補償法示意圖
圖3 基於軌跡預測的動態補償法示意圖線性外插預測的動態補償是依據無法解算定位前的軌跡來預測無法解算區域的位置。以圖4為例,取樣無法解算定位前的N=15個取樣位置進行預測補償,其中每一個取樣位置分別表示為(xn,yn),n=1,2,…,N。而欲補償的位置座標(xnew,ynew)則可依據方程式(1)-(2)計算而得,
xnew=((x1-x2)-(x2-x3)-…-(xN-1-xN))/(N-1) (1)
ynew=((y1-y2)-(y2-y3)-…-(yN-1-yN))/(N-1) (2)
以此類推預測補償無法解算區域的位置,直到系統恢復可以解得近似解為止。藉由我們所提出的方法,可以達到行進軌跡連續不中斷的目標,但是使用線性外插預測的動態補償仍有其不可預期的特例,如在長隧道中發生轉彎情況,為避免這種情況發生,若能使用感測器,如慣性測量單元(Inertial Measurement Unit,IMU)、車載診斷系統(On-Board Diagnostics,OBD)等來取得行進方向角、車速等行車資訊協助動態補償,將有助於改善這問題。
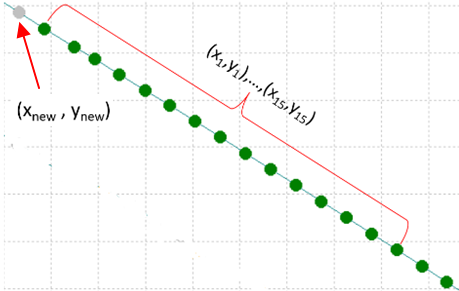 圖4 基於軌跡預測的動態補償法圖例
圖4 基於軌跡預測的動態補償法圖例工研院即時動態定位系統 未來自動化無人載具應用服務之先聲
工研院即時動態定位系統,整合驗證方法與結果
在這一節中,我們將說明使用即時動態定位系統目前在工研院11館頂樓所建置的參考台進行定位整合的驗證測試,目的為確認即時動態定位系統的參考台與行動台間的定位能力。 下表1為即時動態定位測試的相關參數設定,其中,我們使用兩套單頻(L1 Band: 1575.42MHz)多星系(GPS與BeiDou)的U-blox M8T接收機模組分別做為參考台與行動台,接收機取樣頻率與傳輸速率分別設定為5Hz(每200ms可提供一次定位結果)與9600bps,另外,為選擇品質較佳的接收衛星的觀測值進行定位解算,因此設定衛星仰角遮罩(Elevation Mask)與訊雜比遮罩(SNR Mask)分別為15度與35dB,其主要原因是因為當衛星仰角過低或SNR太差的情況下,訊號將容易被建築物或樹木等遮蔽導致多路徑誤差(Multipath Error),造成定位誤差加劇。最後,輸出格式採用由美國國家海洋電子學會(National Marine Electronics Association,NMEA)所制定的標準輸出格式與經度/緯度/高度(Longitude/Latitude/Height,LLH)兩種格式。
表1 即時動態定位測試的相關參數設定
|
項次
|
參數
|
設定
|
|
a
|
定位模式(Positioning Mode)
|
RTK
|
|
b
|
頻段(Frequencies)
|
L1: 1575.42MHz
|
|
c
|
接收機模組類型(Receiver Format)
|
U-blox M8T
|
|
d
|
接收機取樣頻率(Sampling rate)
|
5 Hz
|
|
e
|
衛星星系(Excluded Satellites)
|
GPS, BeiDou
|
|
f
|
接收機傳輸速率(Baud rate)
|
9600 bps
|
|
g
|
衛星仰角遮罩(Elevation Mask)
|
15度
|
|
h
|
衛星訊雜比遮罩(SNR Mask)
|
35 dB
|
|
i
|
輸出格式(Solution Format)
|
NMEA, LLH
|
如下圖5所示,實際測試場域選擇以新竹68快速道路(起自竹東迄至竹北,行進途經中正橋與高鐵/台鐵橋,測試範圍約6公里),基線長度最長約4.2公里,測試車分別固定行駛於外線車道(去程)與內線車道(回程),行進車速最高大於90km/h。
 圖5 規劃的實際場域測試路線
圖5 規劃的實際場域測試路線如下圖6所示,即時動態定位驗證結果可以發現,當測試車行經橋下路段時,衛星訊號必定會因遭遇遮蔽導致無法定位解算,造成定位瞬間中斷(Outage),測試路線過程共造成4處斷點,整體即時動態定位可定位區域的固定解比率約94.3%,近似解約5.7%。
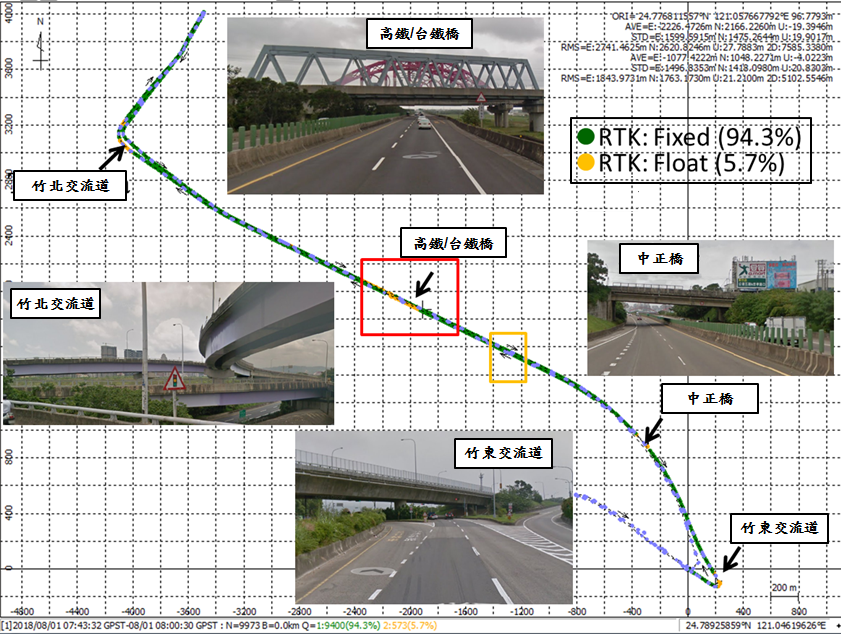 圖6 即時動態定位驗證結果1 – 定位狀態
圖6 即時動態定位驗證結果1 – 定位狀態如下圖7所示,為行經高鐵/台鐵橋時的定位結果,從測試結果可以發現該路段測試軌跡有約4秒以內的中斷情形發生,接著在經過高鐵/台鐵橋後,訊號從近似解恢復至固定解的過程約需要8秒左右,也就是說只要遭遇遮蔽環境,就會造成大約有十秒左右的時間無法定位或定位精度誤差較大的情況,這是即時動態定位在驗證測試上的一大問題。
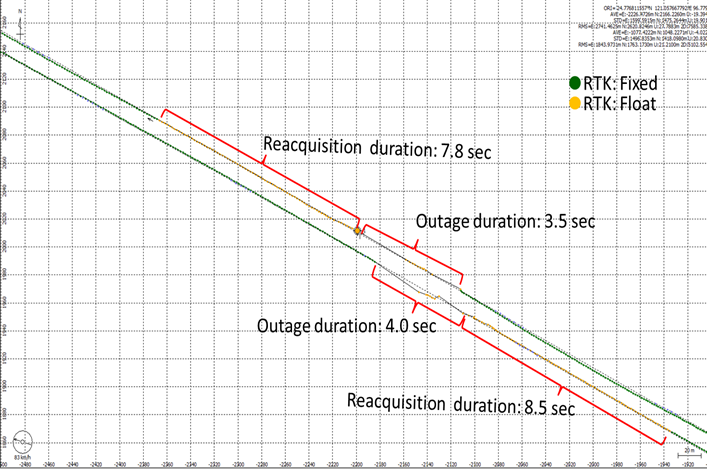 圖7 即時動態定位驗證結果2 – 行經高鐵/台鐵橋時的定位結果
圖7 即時動態定位驗證結果2 – 行經高鐵/台鐵橋時的定位結果如下圖8所示,在加入基於軌跡預測的動態補償法後進行驗證測試,比較行經高鐵橋與台鐵橋時的定位結果,從測試結果可以發現在沒有動態補償的情況下會造成定位資料中斷(Data Outage),如圖8-(a),而加入動態補償之後,因為有線性外插預測的動態補償的作用,因此可以達到行進軌跡100%不中斷,如圖8-(b)。
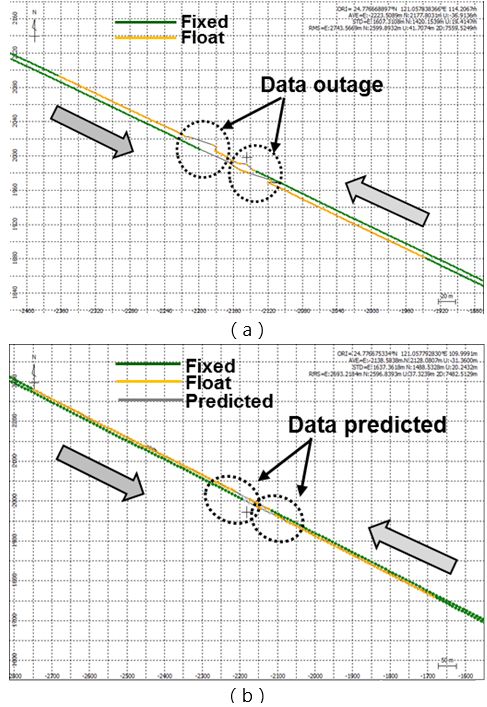 圖8 整合基於軌跡動態補償法的即時動態定位驗證結果1 – 動態補償觀察結果
圖8 整合基於軌跡動態補償法的即時動態定位驗證結果1 – 動態補償觀察結果最後,觀察定位精度的結果,由於測試車保持行駛於外線車道(去程)與內線車道(回程),因此從定位結果可以發現定位精度可以維持在行駛車道的範圍內,達到Lane-level車道級的定位精度(車道寬約3.5米),下圖9為行經高鐵橋與台鐵橋時的衛星圖資定位結果。
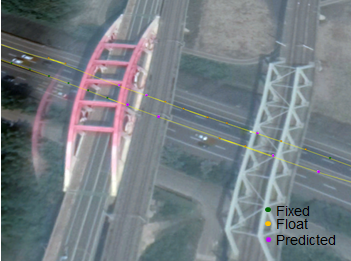 圖9 整合基於軌跡動態補償法的即時動態定位驗證結果2 – 定位精度觀察
圖9 整合基於軌跡動態補償法的即時動態定位驗證結果2 – 定位精度觀察總結而言,公分等級定位系統必須仰賴具備快速而穩定傳輸能力的無線通訊系統,以4G/5G行動通訊來進行參考台與行動台間的無線傳輸將是良好的選擇。而定位精準度與連線狀態則是評估公分等級整合定位技術驗證重要的參考依據,本文藉由即時動態定位法與基於軌跡預測的動態補償法來進行實際場域的動態測試驗證,藉此提供給未來自動化無人載具應用服務一個重要的參考依據。未來公分等級定位技術如何擴展更多應用服務以及面臨都會區及長隧道等遮蔽嚴重環境如何能維持精準定位,都將是公分等級定位整合技術驗證所面臨的挑戰。
參考文獻
[1] A. V. Olesen, “Improved airborne scalar gravimetry for regional gravity field mapping and geoid determination”, National Survey and Cadastre, Denmark, Technical Report no. 24, 2003.
[2] H. Ebadi and M. A. Chapman, “GPS-controlled strip triangulation using geometric constraints of man-made structures”, Photogrammetric Engineering & Remote Sensing, vol.64, no.4, pp.329-333, 1998.
[3] D. D. Lichti, “The interpolation problem in GPS-supported aerial triangulation, Photogrammetric Record”, vol. 17, no. 99, pp. 481-492, 2002.
[4] Zhang, X. and R. Forsberg, “Assessment of long-range kinematic GPS positioning errors by comparison with airborne laser altimetry and satellite altimetry”, J. Geodesy, vol. 81, pp. 201-211, 2007.
[5] Satirapod C. and P. Homniam, “GPS precise point positioning software for ground control point establishment in remote sensing applications”, Journal of Surveying Engineering, vol. 132, no. 1, pp. 11-14, 2006.
[6] Lin, S. G. and D. B. Tzeng, “Single epoch kinematic GPS positioning technique in short baseline”, Journal of Surveying Engineering, vol. 132, no. 2, pp. 52-57, 2006.
[7] Cove, K. M. and M. C. Santos, “An analysis of carrier phase differential kinematic GPS positioning using DynaPos, GPS Solutions”, vol. 8, pp. 210-216, 2004.
[8] Willy Bertiger, Shailen D. Desai, Bruce Haines, Nate Harvey, Angelyn W. Moore, Susan Owen, Jan P. Weiss, “Single receiver phase ambiguity resolution with GPS data”, Journal of Geodesy, 2010.
[9] C. Rizos, “Network RTK Research and Implementation - A Geodetic Perspective”, Journal of Global Positioning Systems, vol. 1, no. 2, pp. 144-150, 2002.
相關連結: 回177期_5G及新興應用 專輯
相關連結: 探索車聯網技術於5G關鍵應用
相關連結: 回177期_5G及新興應用 專輯